Sign in
Sign in
0

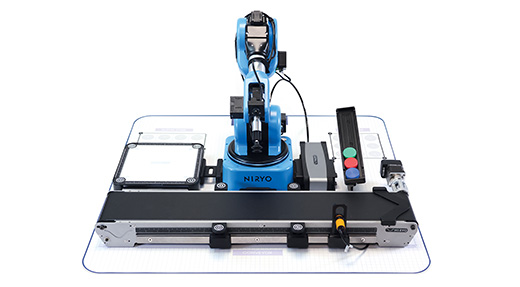
The Ned 2 supports third-party open-source hardware such as Micro:bit, Arduino and Raspberry Pi. These components can be connected and powered via serial ports on the back panel of the robot.

The Ned2 is equipped with several external connectors, making it easy to connect and power third-party sensors measuring data such as temperature, pressure, distance and much more. Sensory data can even be used in Blockly giving rise to endless programming possibilities.
Niryo has integrated ROS Noetic Ninjemys into its Ned2, this framework used by robotics developers is increasingly used in real-life applications: industry, autonomous cars, drones etc.
ROS benefits from a growing community of robotics enthusiasts, and is also used in schools and engineering colleges to teach industrial robotics. Niryo also provides tutorials to help you understand how it works.
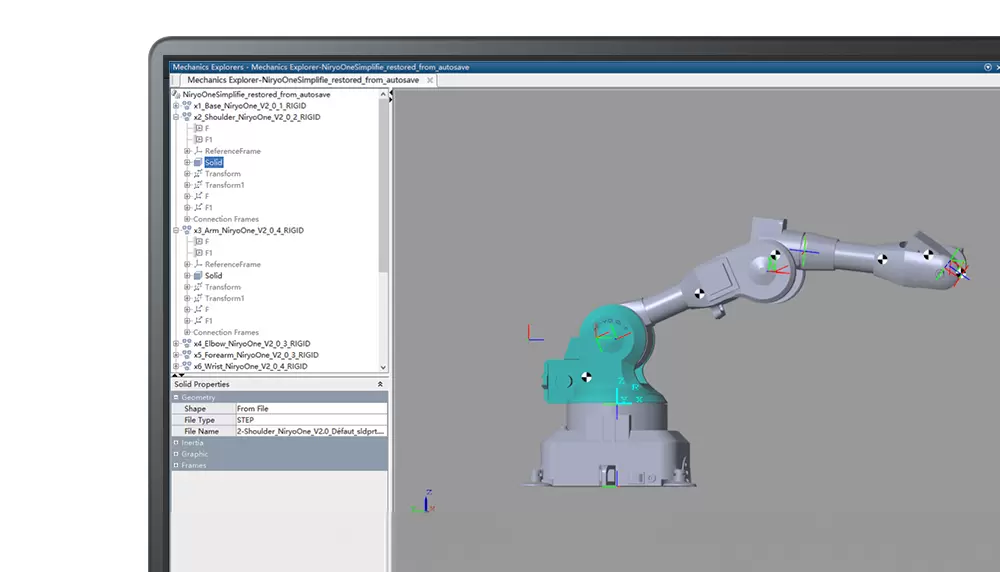
Simulation is an important part of learning robotics. That’s why Niryo works with partners like Matlab and RoboDK to offer a complete digital twin of its robot. This gives you the freedom to simulate all your programs, positions and trajectories in complete autonomy, without having the robot next to you.