During the visit, we had the opportunity to chat with Laurent ROY, head of the Rob&IA Professional License at the Béziers IUT.
He explained to us what these problems were, and how Niryo’s 6-axis robotic arm solution was able to meet their needs.
“Our students are trained in robotics and Python programming. Before tackling more industrial robots, it seemed more logical to us to use Ned2, which have an easy-to-use interface and a Python API.”
“The Niryo cobot is a real asset for getting to grips with Python programming and the basics of robotics, particularly with regard to positioning, joint and operational spaces.”
“The Ned2 robotic arm is a good product to start with robotics, allowing students to develop their inventiveness, especially during projects.” ended Mr. Roy.
Mr. Roy’s students worked on the Ned2 robotic arm for several projects. The robots are used both for very basic handholding, relating to robot movements, and for more advanced computer-related courses.
In terms of use cases with our 6-axis robotic arm, Mr Roy explained precisely how the robot was used:
“We had a practical case where the robot had to serve glasses, there was a robot that had to play chess, another robot that acted as an assistant for a game.”

“The students work in simulation on Gasebo and we can control the robot and then we just have to change the IP address to connect to the real robot.” In addition to the aforementioned practical cases, the robot is also used for learning programming, more specifically Python.
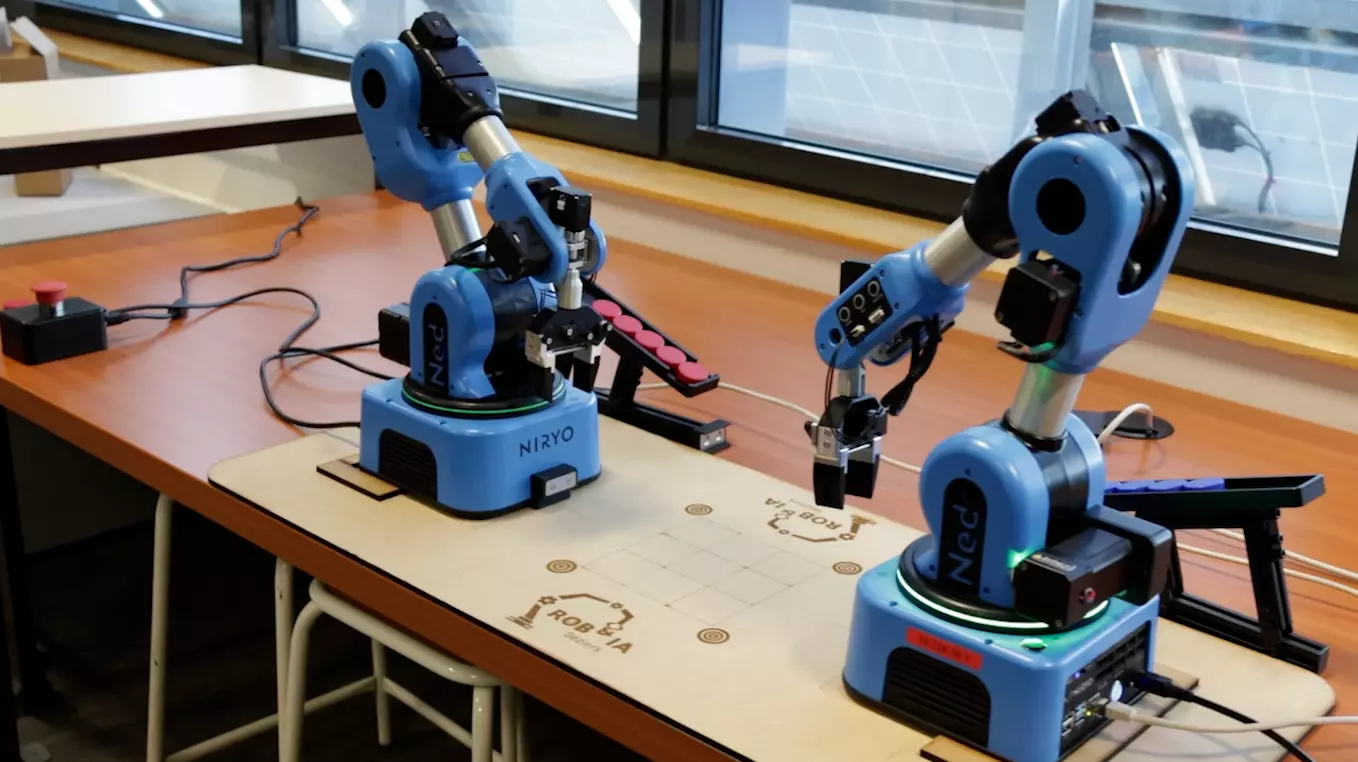
The students also performed an exercise where the aim was to make a Tic-Tac-Toe. Mr. Roy explained how the students went about achieving this:
“The aim of the TP is to carry out a pick and place with two robots simulating a game of Tic-Tac-Toe (without AI for the moment) by integrating the learning mode (for the moment only with “measured” poses)” says Laurent Roy.

To achieve this, the students have 3 robots at their disposal. The aim of this exercise is to develop the basics of robotics and train in the Python programming language.
 Contact
Contact 





 Sign in
Sign in