
 Contact
Contact 





 Anmelden
Anmelden 

Die Auswahl der verschiedenen Teile eines Roboters kann ein wenig kompliziert werden, vor allem bei den verschiedenen Optionen, die auf dem Markt erhältlich sind.
Wenn es um Motoren geht, wird die Entscheidung nie einfacher. In der Tat sind Roboter auf Hochleistungsmotoren angewiesen, um ihre Bewegungen anzutreiben und ihre Aufgaben mit Präzision und Geschwindigkeit zu erfüllen.
Es gibt viele verschiedene Faktoren zu berücksichtigen. In diesem Artikel besprechen wir einige der wichtigsten Kriterien, die Sie bei der Auswahl eines Motors für einen kollaborativen Roboter für Forschung und Lehre berücksichtigen sollten.
1. Leistung und Drehmoment
Die Anforderungen an die Leistung und das Drehmoment eines Lernroboterarms sind in der Regel geringer als die von Industriearmrobotern, hängen aber dennoch vom Verwendungszweck des Roboters ab. Wenn der Roboter für schweres Heben oder präzise Bewegungen ausgelegt ist, benötigt er einen Motor mit höherer Leistung und höherem Drehmoment. Im Allgemeinen ist ein Motor mit einer Leistung von etwa 50-100 Watt und einem Drehmoment von 0,2-0,5 Nm für die meisten Cobots im Bildungsbereich ausreichend.
Weitere Informationen zu diesem Video, das genaue Daten über Ned2 und seine Fähigkeiten:
2. Maximale Beschleunigung
Je höher das Übersetzungsverhältnis des Getriebes ist, desto höher ist auch die maximale Beschleunigung des Motors.
Die maximale Beschleunigung des Motors ist ebenfalls eine wichtige Überlegung bei der Auswahl eines Motors für einen Lernarmroboter. Der Motor sollte in der Lage sein, schnell zu beschleunigen und abzubremsen, um sicherzustellen, dass der Roboter schnelle und effiziente Bewegungen ausführen kann.
3. Erschwinglichkeit
In der Regel suchen Universitäten und Schulen nach erschwinglichen Materialien für ihre Klassenzimmer, vor allem, weil sie dazu neigen, große Mengen zu kaufen, um eine faire Bildungserfahrung für jeden Studenten zu gewährleisten.
Die Kosten sind oft ein begrenzender Faktor im Bildungsbereich. Es ist zwar wichtig, einen Motor auszuwählen, der den Anforderungen des Roboters entspricht, aber es ist auch wichtig, ein Gleichgewicht zwischen Kosten und Leistung herzustellen. Im Allgemeinen ist ein Motor mit einer Preisspanne von $50-$200 für die meisten Lernarmroboter geeignet.
4. Leistungsdichte
Die Leistungsdichte bezieht sich auf die Menge an Leistung, die der Motor im Verhältnis zu seiner Größe und seinem Gewicht erzeugen kann. Im Allgemeinen wird für Lernarmroboter ein Motor mit einer höheren Leistungsdichte bevorzugt, da er ein kompakteres und leichteres Design ermöglicht. Ein Motor mit einer Leistungsdichte von etwa 1-2 kW/kg ist für die meisten Fälle geeignet.
5. Hochgeschwindigkeits-Fähigkeit
Während Industrieroboterarme oft eine hohe Geschwindigkeit benötigen, sind die Anforderungen an die Geschwindigkeit bei Robotern, die für die Ausbildung entwickelt wurden, in der Regel geringer. Dennoch kann ein Motor mit hoher Geschwindigkeit bei bestimmten Anwendungen von Vorteil sein, z. B. wenn der Roboter schnelle Bewegungen ausführen muss oder wenn eine höhere Betriebsfrequenz erforderlich ist. entsprechend den Anwendungsfällen der Roboter.
Die Geschwindigkeit eines Lernarm-Roboters hängt von seinem Verwendungszweck ab, aber im Allgemeinen ist ein Motor mit einem Drehzahlbereich von 10-100 RPM für die meisten Anwendungen ausreichend. Der Motor sollte außerdem in der Lage sein, die Geschwindigkeit über den gesamten Bewegungsbereich konstant zu halten, um genaue und präzise Bewegungen zu gewährleisten.
6. Verlässlichkeit
Zuverlässigkeit ist ein entscheidender Faktor bei der Auswahl eines Motors für einen Bildungsroboterarm, da diese Roboter oft zu Lehr- und Lernzwecken eingesetzt werden. Der Motor sollte so konzipiert sein, dass er konstant und zuverlässig arbeitet und nur minimale Wartung erfordert. Es ist auch wichtig, dass Sie einen Motor von einem renommierten Hersteller mit einer guten Erfolgsbilanz in Bezug auf Qualität und Zuverlässigkeit wählen.
Was kommt als Nächstes?
Sobald Sie Ihre Bedürfnisse mit diesen Kriterien abgeglichen haben, können Sie anhand der nachstehenden Tabelle den am besten geeigneten Motor für Ihr Projekt auswählen:
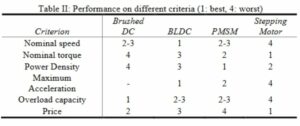
Quelle: core.ac.uk
Bei Niryo, unsere kollaborativen Sechs-Achsen-Roboter auf zwei Arten von Motoren: die speziell angefertigten Schrittmotoren und die Servomotoren XL330 und XL430.

Die Schrittmotoren werden für die ersten drei Achsen verwendet: Fuß, Schulter und Ellbogen, um eine akzeptable Leistungsdichte und ein angemessenes Drehmoment zu gewährleisten.
Für die anderen drei Achsen – Unterarm, Handgelenk und Hand – wurden hingegen Servo-DC-Motoren gewählt . Diese Wahl wurde getroffen, um eine gute Geschwindigkeit zusammen mit einer angemessenen Überlastkapazität zu gewährleisten, aber auch wegen ihrer kompakten Größe und ihres geringen Gewichts.
Wir sollten anmerken, dass beide Typen als erschwinglich gelten, damit der Endpreis des Roboters in einem akzeptablen Rahmen bleibt und gleichzeitig sichergestellt werden kann, dass der Roboter effektiv funktioniert und eine wertvolle Lernerfahrung für die Studenten darstellt!
Und wenn wir schon dabei sind… ein kurzer Blick in unser französisches Werk, wo natürlich Motoren am Fließband produziert werden.
Vielen Dank für die Lektüre. Für weitere Informationen nehmen Sie bitte Kontakt mit uns auf, wir antworten umgehend.


