






 Se connecter
Se connecter 








Le choix des différentes pièces d’un robot peut s’avérer quelque peu compliqué, surtout avec les différentes options disponibles sur le marché.
En ce qui concerne les moteurs, la décision n’est jamais facile à prendre. En effet, les robots s’appuient sur des moteurs très performants pour effectuer leurs mouvements et exécuter leurs tâches avec précision et rapidité.
Les facteurs à prendre en considération sont nombreux et variés. Dans cet article, nous aborderons quelques-uns des critères clés à prendre en compte lors du choix d’un moteur pour un robot collaboratif dédié à la recherche et à l’éducation.
-
Puissance et couple
Les exigences en matière de puissance et de couple d’un bras robotique éducatif sont généralement inférieures à celles des bras robotiques industriels, mais elles dépendent toujours de l’utilisation prévue du robot. Si le robot est conçu pour soulever des charges lourdes ou effectuer des mouvements précis, il nécessitera un moteur d’une puissance et d’un couple plus élevés. En général, un motoréducteur d’une puissance d’environ 50 à 100 watts et d’un couple de 0,2 à 0,5 Nm suffit pour la plupart des cobots destinés à l’éducation.
Vous trouverez plus d’informations dans cette vidéo qui présente des données précises sur Ned2 et ses capacités :
-
Accélération maximale
Plus le rapport d’engrenage du réducteur est élevé, plus l’accélération maximale du moteur sera élevée.
L’accélération maximale du moteur est également un élément important à prendre en compte lors de la sélection d’un moteur pour un robot à bras éducatif. Le moteur doit être capable d’accélérer et de décélérer rapidement afin que le robot puisse effectuer des mouvements rapides et efficaces.
-
Prix abordable
En général, les universités et les écoles recherchent des matériaux abordables pour leurs salles de classe, en particulier parce qu’elles prévoient d’acheter des quantités importantes pour garantir une expérience éducative équitable à chaque étudiant.
Le coût est souvent un facteur limitant dans les établissements d’enseignement. S’il est important de sélectionner un moteur qui réponde aux exigences du robot, il est également important de trouver un équilibre entre le coût et les performances. Généralement, un motoréducteur dont le prix est compris entre 50 et 200 dollars convient à la plupart des robots à bras éducatifs.
-
Densité de puissance
La densité de puissance fait référence à la quantité de puissance pouvant être générée par le moteur par rapport à sa taille et à son poids. D’une manière générale, un moteur ayant une densité de puissance plus élevée est préférable pour les robots à bras éducatifs, car il permet une conception plus compacte et plus légère. Un motoréducteur ayant une densité de puissance d’environ 1 à 2 kW/kg est approprié dans la plupart des cas.
-
Capacité de vitesse élevée
Alors que les bras robotiques industriels nécessitent souvent des capacités de vitesse élevées, ceux qui sont conçus pour l’éducation ont généralement des exigences de vitesse plus faibles. Toutefois, un moteur à grande vitesse peut être utile dans certaines applications, par exemple lorsque le robot doit effectuer des mouvements rapides ou lorsqu’une fréquence de fonctionnement plus élevée est requise en fonction des cas d’utilisation du robot.
La vitesse d’un robot à bras éducatif dépend de l’usage auquel il a été conçu, mais globalement, un motoréducteur, d’une vitesse comprise entre 10 et 100 tours/minute, est suffisant pour la plupart des applications. Le moteur doit également être capable de maintenir une vitesse constante sur toute l’étendue de son mouvement afin de garantir des mouvements précis et exacts.
-
Fiabilité
La fiabilité est un facteur crucial lors de la sélection d’un moteur pour un bras robotique éducatif, car ces robots sont souvent utilisés à des fins d’enseignement et d’apprentissage. Le moteur doit être conçu pour fonctionner de manière constante et fiable, avec un minimum d’entretien. Il est aussi important de choisir un moteur provenant d’un fabricant réputé pour sa qualité et sa fiabilité.
Que faire ensuite ?
Une fois que vous avez fait correspondre vos besoins à ces critères, vous pourrez choisir le moteur le plus adapté à votre projet en vous référant au tableau ci-dessous :
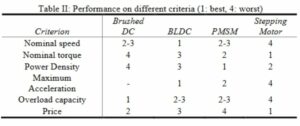
Source : core.ac.uk
Chez Niryo, nos robots collaboratifs à six axes utilisent deux types de moteurs : les moteurs pas à pas fabriqués sur mesure et les servomoteurs XL330 et XL430.

Les moteurs pas à pas sont utilisés pour les trois premiers axes : base, épaule et coude, afin de garantir une densité de puissance acceptable et un couple adéquat.
En revanche, les servomoteurs à courant continu ont été choisis pour les trois autres axes : avant-bras, poignet, et main. Ce choix a été fait pour assurer une bonne vitesse et une bonne capacité de surcharge, mais aussi en raison de leur taille compacte et de leur poids léger.
Il convient de noter que les deux types sont considérés comme abordables de sorte que le prix final du robot reste dans une fourchette raisonnable, tout en veillant à ce que le robot fonctionne efficacement et constitue une expérience d’apprentissage précieuse pour les étudiants !
Et pendant que nous y sommes… un aperçu de notre usine française, où les moteurs sont bien sûr sur la chaîne de montage.
Merci de votre lecture. Pour plus d’informations, contactez-nous, nous vous répondrons rapidement.