Se connecter
Se connecter
0

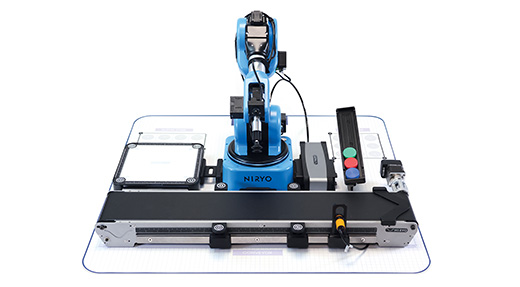
Le Ned 2 prend en charge le matériel open source tiers tel que MicroBit, Arduino et Raspberry Pi. Ces composants peuvent être connectés et alimentés via des ports en série sur les I/O du panel robot.

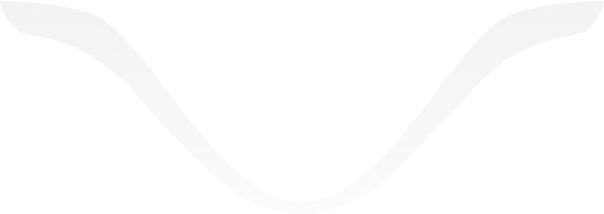
Le Ned2 est équipé de plusieurs connecteurs externes, ce qui facilite la connexion et l’alimentation de capteurs tiers mesurant des données telles que la température, la pression, la distance et bien plus encore. Les données sensorielles peuvent même être utilisées dans Blockly, donnant lieu à des possibilités de programmation infinies.
Niryo a intégré ROS Noetic Ninjemys dans son Ned2, ce framework utilisé par les développeurs en robotique est de plus en plus utilisé dans des applications réelles : industrie, voitures autonomes, drones etc.
ROS bénéficie d’une communauté croissante de passionnés de robotique et est également utilisé dans les écoles et écoles d’ingénieurs pour enseigner la robotique industrielle. Niryo propose également des tutoriels pour vous aider à comprendre son fonctionnement.
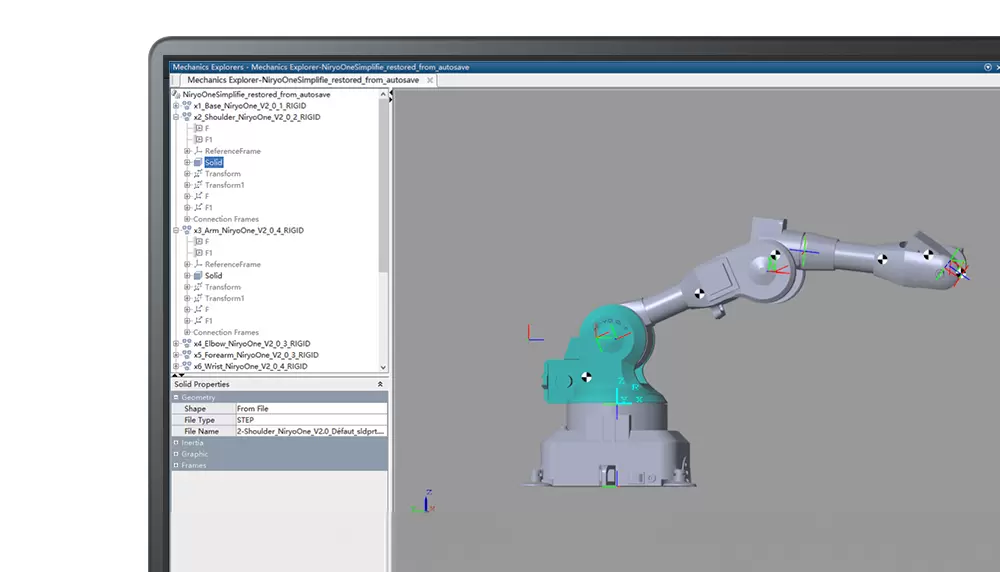
La simulation est une partie importante de l’apprentissage de la robotique. C’est pourquoi Niryo travaille avec des partenaires comme Matlab et RoboDK pour proposer un jumeau numérique complet de son robot. Cela vous donne la liberté de simuler tous vos programmes, positions et trajectoires en toute autonomie, sans avoir le robot à côté de vous.