Se connecter
Se connecter 







Découvrez PyNiryo, notre package Python

PyNiryo est un package Python permettant d’envoyer des commandes Ned depuis n’importe quel système, via une API TCP/IP. Il s’agit de la continuité de l’API TCP/IP de Niryo One, avec une installation simplifiée et un éventail de fonctions plus large.
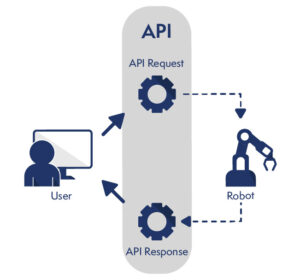
Qu’est-ce qu’une API ?
L’Application Programming Interface (API) est un ensemble de fonctions et de définitions qui facilite l’intégration d’un logiciel dans un programme.
(Schéma 🙂
Utilisateur Requête API Robot Réponse API
Qu’est-ce que le protocole TCP ?
Le Transmission Control Protocol (TCP) est le protocole de communication réseau qui permet l’envoi de messages entre votre ordinateur et votre robot.
Que peut-on faire avec PyNiryo ?
PyNiryo permet un contrôle facile et complet d’un ou plusieurs robots connectés au même réseau que votre ordinateur, grâce à des commandes de haut niveau. Ces commandes sont envoyées via un script Python depuis votre ordinateur, puis récupérées et interprétées par le serveur TCP du robot. Elles sont ensuite exécutées et les résultats sont envoyés à votre ordinateur par le serveur TCP.
Quels sont les avantages de PyNiryo ?
PyNiryo permet de contrôler un ou plusieurs robots à partir d’un programme Python qui s’exécute sur votre ordinateur. Par conséquent, le code est plus facile à développer et à déboguer car vous pouvez simplement modifier votre code dans votre interface de développement préférée et le relancer sans avoir à utiliser SSH.
De plus, vous pouvez lancer le programme du robot directement depuis votre ordinateur, ce qui vous permet de bénéficier, selon la configuration de ce dernier, de ressources supérieures à celles du Raspberry Pi. Vous pourrez ainsi intégrer des fonctions plus gourmandes en ressources comme le traitement d’image ou encore l’apprentissage automatique (machine learning). Ce dernier permet d’aborder l’utilisation de Vision dans le domaine de l’Industrie 4.0.
Les fonctionnalités de PyNiryo
PyNiryo embarque plus d’une quarantaine de fonctions permettant de contrôler le robot et son écosystème (mouvements, utilisation des outils, courroie transporteuse, jeu de vision…), facilitant ainsi la création de prototypes d’applications industrielles adaptés à l’industrie 4.0.
PyNiryo permet également de récupérer des informations sur la position et l’état actuel du robot, ainsi que les valeurs des broches GPIO, la vision de la caméra et bien d’autres fonctions.
La communication avec le robot via TCP/IP permet également de contrôler plusieurs robots à partir du même programme. Ainsi, il est possible de combiner PyNiryo et la bibliothèque Python Threading. Cette combinaison permet le contrôle de plusieurs Ned en simultané, simulant par exemple une chaîne de production qui utilise la robotique collaborative.
Vous pouvez trouver plus d’informations à ce sujet en vous référant à notre tutoriel sur le multithreading.
PyNiryo
L’API PyNiryo reprend les fonctionnalités du robot disponibles via ROS. Voici une liste non exhaustive de ces fonctionnalités :
- Déplacer le robot
- Utiliser la vision
- Contrôler les courroies transporteuses
- Récupérer les informations sur les broches GPIO
Des fonctions de vision ont également été ajoutées à PyNiryo pour permettre à l’utilisateur de créer son propre pipeline de traitement d’images et explorer davantage la robotique collaborative dans l’industrie 4.0.
Ces fonctions s’appuient sur OpenCV, une bibliothèque open source pour la vision par ordinateur. Elle permet également d’utiliser ces images avec des frameworks de Deep Learning comme Tensorflow et PyTorch.
L’installation de PyNiryo est aussi simplifiée, puisqu’il est disponible sur l’installation du paquet Python PyPi. Pour l’installer, il suffit d’exécuter la commande « pip install pyniryo ».
Pour plus d’informations sur l’installation de PyNiryo, cliquez ici.
Conclusion
En conclusion, notre package Python PyNiryo est une interface pleine de ressources vous permettant de concrétiser plusieurs projets orientés vers l’industrie 4.0 de manière simple, rapide et efficace.