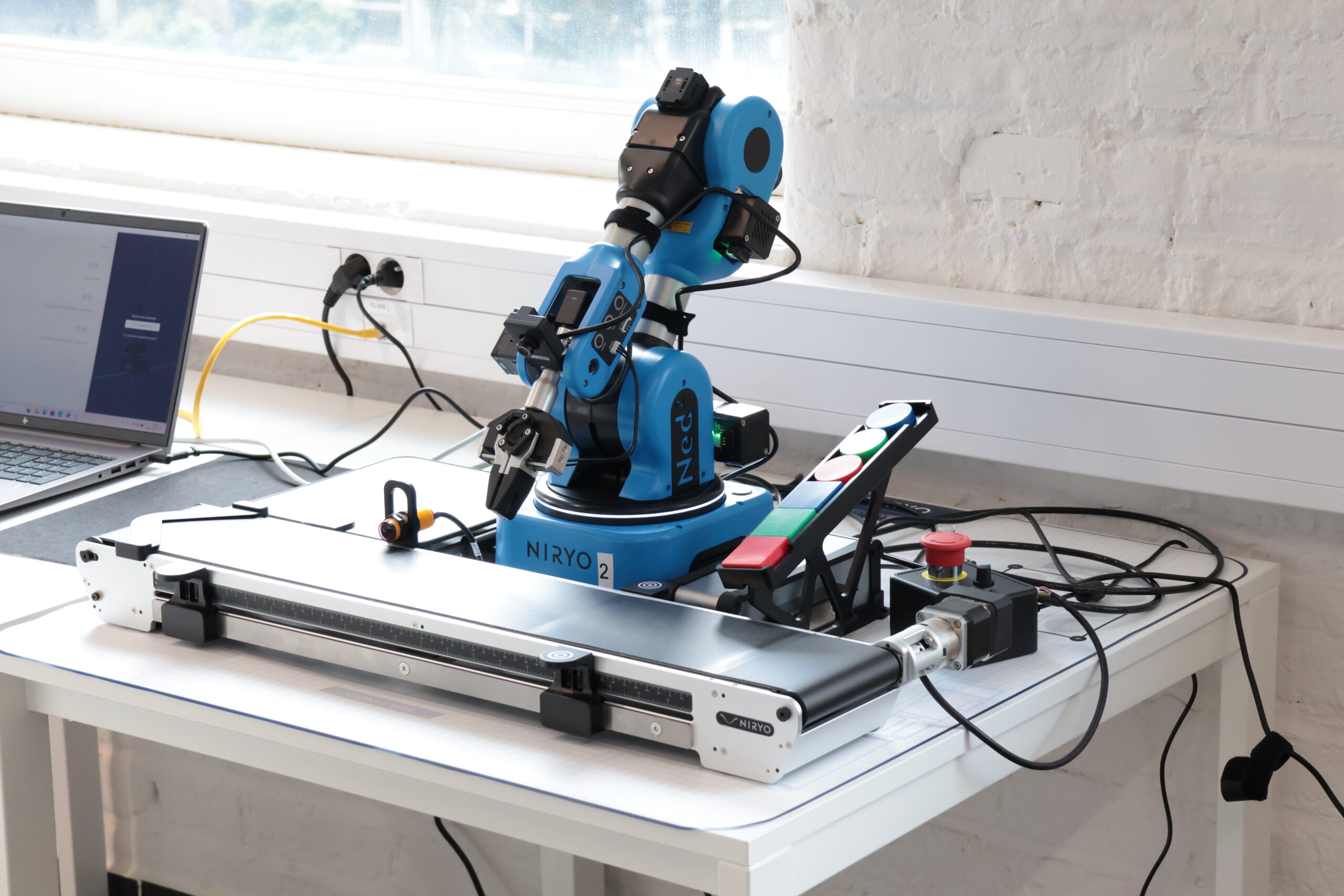
The collaborative robot for accessible and flexible automation
The most advanced robot for education
Available for all use cases
All-in-one pack to get started in robotics
Complete robotics pack for all levels
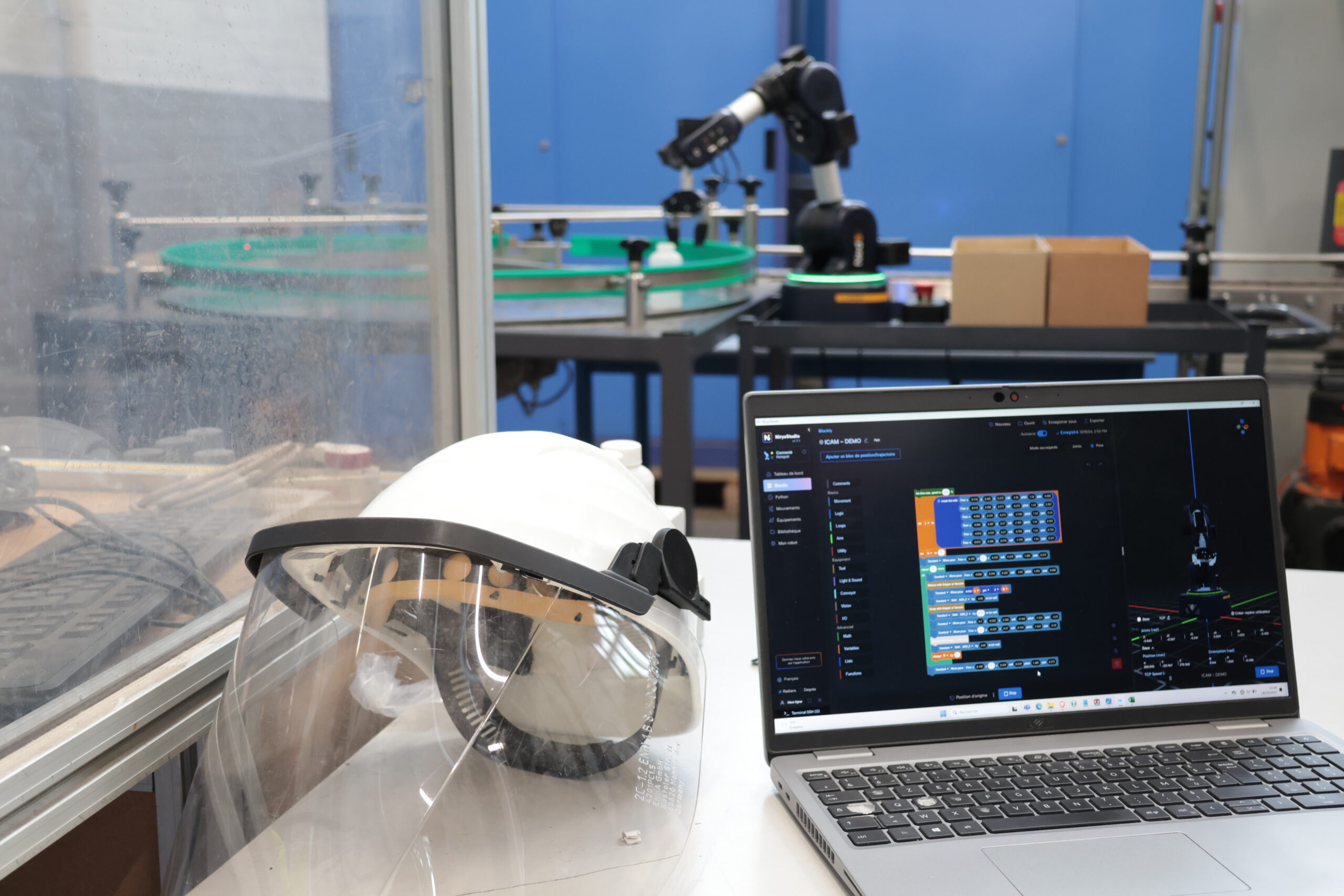
Simplified programming with Blockly and Python.
Tailor-made resources, adapted to your learning objectives.
Tailor-made automation of your processes.
Free support to make your project a success.
Expert support to maximize your performance.
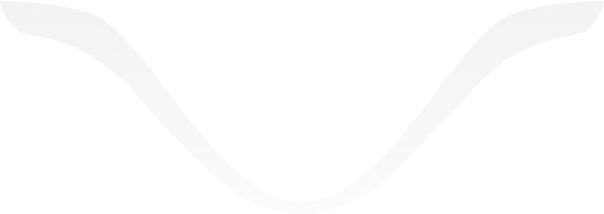
How a food sauce manufacturer industrialized and automated the quality control of its bottles.
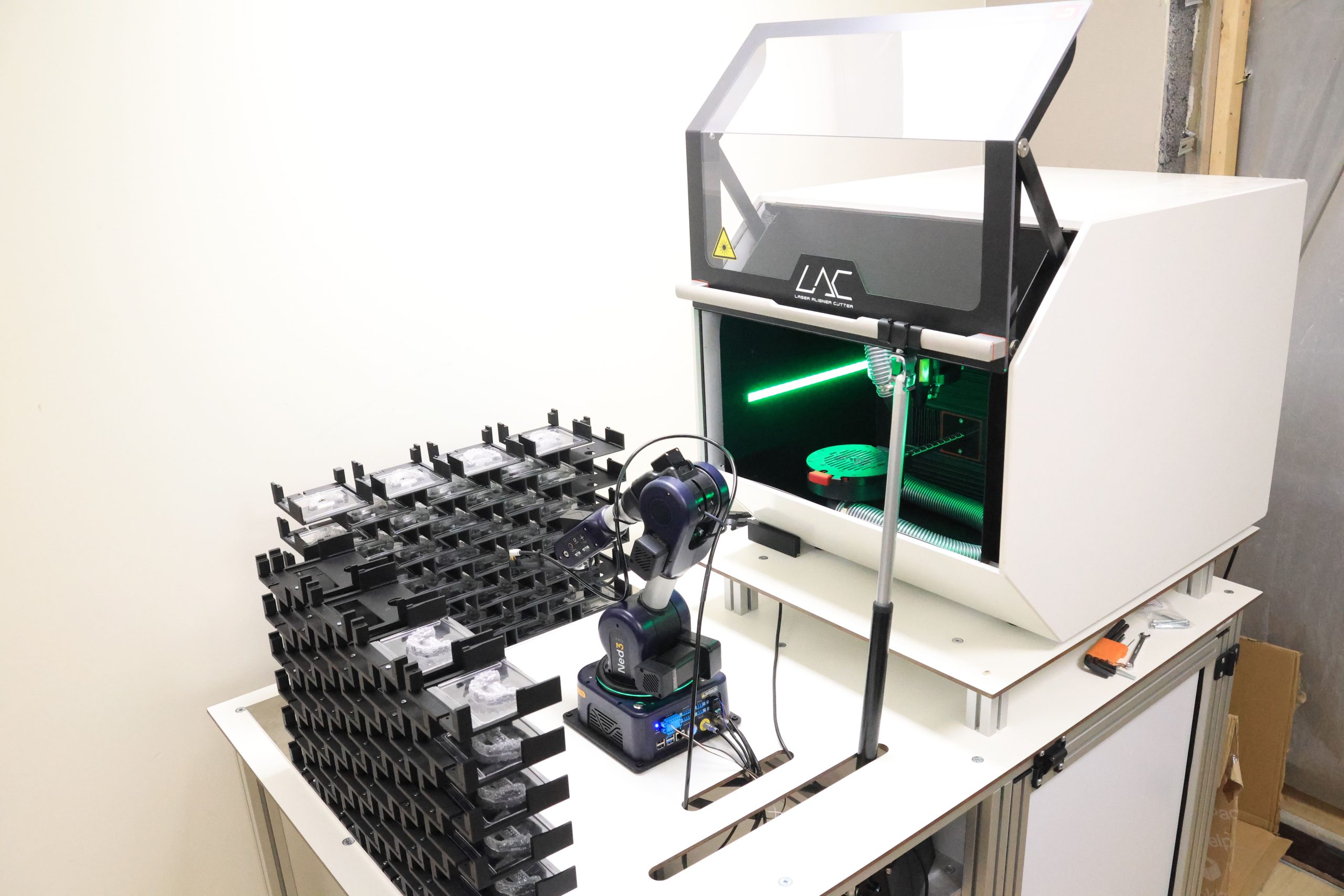
The potential of robotics in the classroom.
Skills development with Niryo
Latest application updates
Answers to your questions
Detailed specifications and features
3D Accessories Models
Everything you need to know about Niryo
Join the distributors who trust us.
Join the Niryo team
From prototype to production: integrating a collaborative robot step by step
ROS, Python, Blockly… How to adapt languages to each school level
5G and educational robotics: Niryo as a technological demonstration tool
Differentiate and promote your school thanks to STEM learning
Why teach robotics in high school?
NiryoAcademy: A platform designed by teachers, for teachers
What aspects of robotics can be worked with a 6-axis robotic arm?
Reducing human errors through automation
The importance of Robotics in Industry 4.0
Collaborative robots vs. traditional robots: a comparative guide
5 benefits of transitioning to automation
Educational robots for STEM
ROI and Impact for Manufacturers
Collaborative spaces in Industry 5.0 within schools
How can different grippers meet your learning needs?
The 5 key principles of robotic palletizing
Collaborative robots in engineering schools
Industrial robotics trends in 2025






 Sign in
Sign in