Le robot collaboratif pour une automatisation accessible et flexible
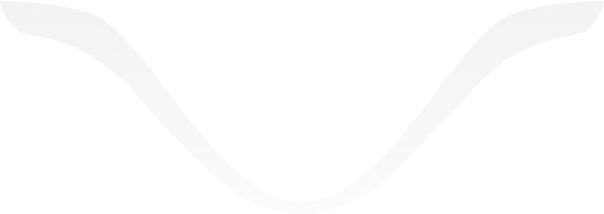
Le robot le plus avancé pour l'éducation
Disponibles pour tous les cas d’usage
Pack tout-en-un pour débuter en robotique
Packs robotiques complets pour tous les niveaux
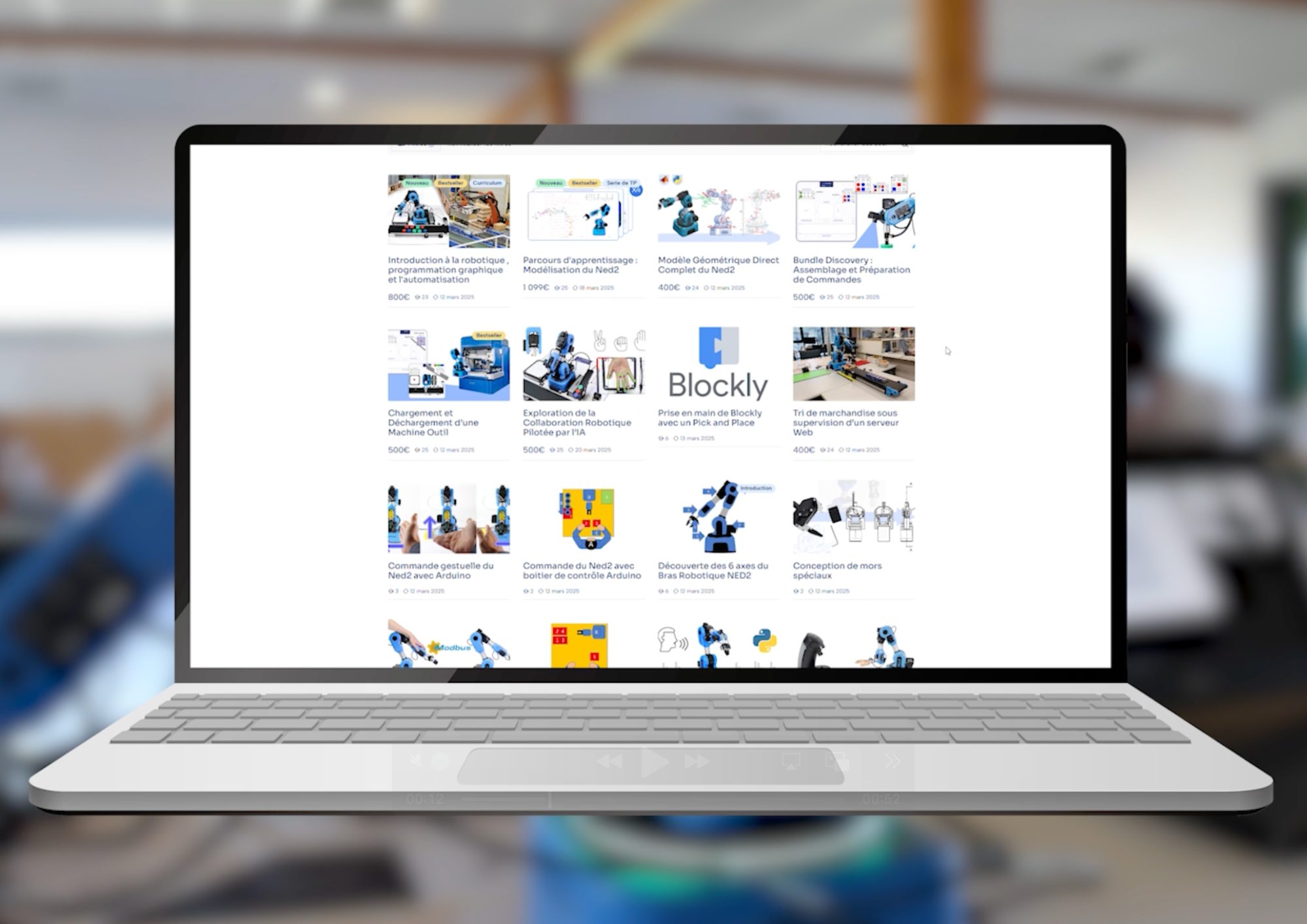
Programmation simplifiée avec Blockly et Python.
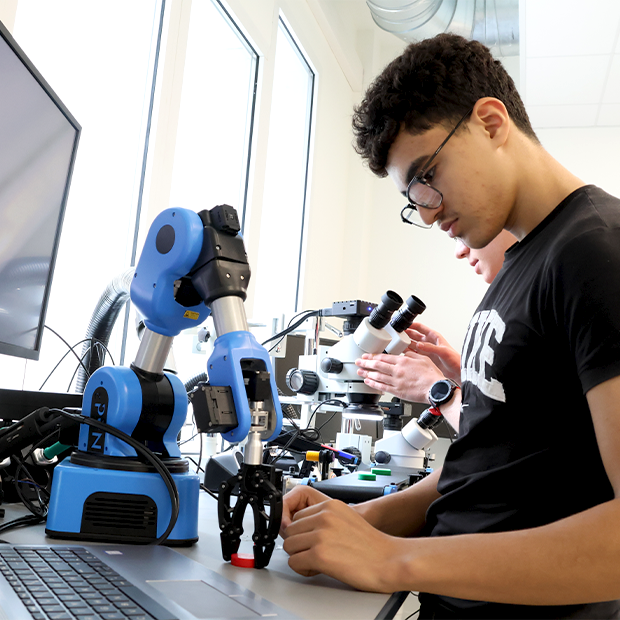
Des ressources sur-mesure, adaptées à vos objectifs d'apprentissage.
Automatisation sur-mesure de vos processus.
Accompagnement gratuit pour réussir votre projet.
Accompagnement d'expert pour maximiser vos performances.
Comment un fabricant de sauce alimentaire a industrialisé et automatisé le contrôle qualité de ses flacons.
Le potentiel de la robotique en classe.
Des ressources adaptées à vos objectifs
Des montées en compétence avec Niryo.
Dernières mise à jour applicatives
Les réponses à vos questions
Spécifications et caracatéristiques détaillées
Modèles d’accessoires 3D
Tout savoir sur Niryo
Rejoignez les distributeurs qui nous font confiance.
Rejoindre l'aventure Niryo
ROS, Python, Blockly… Comment adapter les langages à chaque niveau scolaire ?
La 5G et la robotique éducative : Niryo comme outil de démonstration technologique
Différencier et valoriser votre établissement via l’enseignement STEM
Pourquoi enseigner la robotique dès le lycée ?
NiryoAcademy, une plateforme pensée par et pour les enseignants
Quels aspects de la robotique travailler avec un bras robotisé 6 axes ?
Réduction des erreurs humaines grâce à l’automatisation
L’importance de la robotique dans l’industrie 4.0
Robots collaboratifs vs robots traditionnels : le guide comparatif
Les 5 avantages à passer à l’automatisation
Le robot éducatif pour les STEM
ROI et impact pour les industriels
Comment passer d’une petite PME à une moyenne/grande grâce à l’automatisation
Les espaces collaboratifs de l’industrie 5.0 au sein des écoles
Comment les différents préhenseurs (grippers) peuvent-ils répondre à vos besoins en matière d’apprentissage ?
Les 5 principes clés de la palettisation robotisée
Les robots collaboratifs dans les écoles d’ingénieurs
Les tendances de la robotique industrielle en 2025






 Se connecter
Se connecter