Contact
Contact 





 Se connecter
Se connecter La programmation de votre robot devient un jeu d'enfant. Contrôlez votre robot sans système de programmation avec des mouvements fluides et précis.






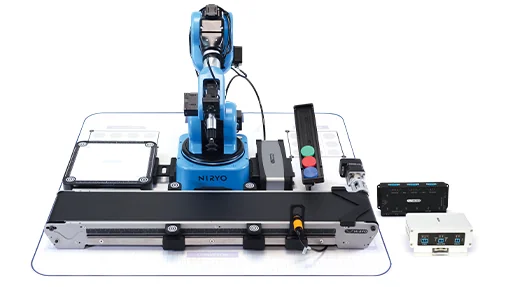
 300g de payload
300g de payload  ±0.5mm de répétabilité
±0.5mm de répétabilité  Reach 49cm/Ø1m
Reach 49cm/Ø1m  Garantie 1 an
Garantie 1 an 
La programmation de votre robot devient un jeu d'enfant. Contrôlez votre robot sans système de programmation avec des mouvements fluides et précis.

Solution plug & play avec un système magnétique "easy connect" pour brancher vos pinces en quelques secondes.

Connectez vos accessoires et un nombre infini de capteurs pour laisser place à vos projets les plus complexes.

Les couleurs du ledring permettent de comprendre facilement l'état actuel de votre robot.

Enseigner, travailler et apprendre avec des steppers silencieux. Parfait pour rester concentré et s'entraîner en tout confort pendant des heures.

Personnalisez votre écosystème sans perdre en précision et en robustesse grâce au système magnétique snaplink
Initiez vos élèves à la robotique avec Blockly, un langage visuel simple et ludique, idéal pour les premières leçons de programmation.
Enseignez la robotique avancée avec Python, pour programmer le NED2 et exploiter des librairies spécifiques à vos projets pédagogiques.

Développez les compétences robotiques de vos étudiants avec ROS, pour découvrir la robotique modulaire et les systèmes connectés dans un cadre éducatif.

Compatible ROS2, le NED2 permet d’aborder la coordination multirobot et les projets collaboratifs en classe.
Avec sa classe MATLAB dédiée, le NED2 permet aux élèves de tester des algorithmes et d’apprendre la cinématique et la programmation robotique.
Chaque NED2 inclut une licence RoboDK pour simuler et programmer le bras robotique, parfait pour l’enseignement STEM et les TP en toute sécurité.
Explorez le machine learning avec TensorFlow, pour des projets éducatifs sur la reconnaissance d’images et l’IA robotique.
Apprenez la vision par ordinateur avec OpenCV, pour détecter et suivre des objets dans vos activités pédagogiques.
Compatible avec NVIDIA, le NED2 permet d’enseigner l’IA embarquée et la vision robotique avancée aux étudiants.
Solutions logicielles et matérielles pour la robotique et l’IA.
Logiciel pour la simulation et la programmation de robots.
Bibliothèque open source pour la programmation visuelle par blocs.

Framework open source pour le développement de logiciels robotiques.
Bibliothèque pour le contrôle des robots Niryo.
Framework open source utilisé en robotique pour les tâches d’apprentissage automatique.
Bibliothèque open source pour la vision par ordinateur et le traitement d’images.
Environnement et langage de programmation propriétaire, largement utilisé en robotique pour la simulation numérique.
Langage de programmation reconnu pour sa simplicité et sa polyvalence dans diverses applications, y compris la robotique.