NATE PLATFORM
Conçue pour l’industrie
Créez et déployez des solutions d’automatisation industrielle. Conçue pour les fabricants, les intégrateurs de systèmes et les OEM
Smart Machines
Robots
Actionneurs
Préhenseurs
NiryoStudio for Nate
Découvrez Nate Platform
NED PLATFORM
Conçue pour l’éducation
Apprenez la robotique et l’automatisation par la pratique. Conçue pour les enseignants, les étudiants et les chercheurs
Packages
Accessoires
NiryoStudio for Ned
NOUVEAU — Nate.Platform La plateforme robotique modulaire pour l’automatisation industrielle
Découvrez
SECTEURS INDUSTRIELS
Laboratoires
Logistique et copacking
Agroalimentaire
Tous les secteurs
SERVICES
Niryo Success pour l’industrie
Support gratuit pour faire de votre projet un succès.
Niryo Integration
Automatisation sur-mesure de vos processus
TÉMOIGNAGES CLIENTS
Découvrez leurs histoires
Du défi au déploiement : découvrez comment nos clients créent de la valeur avec Niryo
NIVEAUX D’ENSEIGNEMENT
Enseignement secondaire
Fillières techniques et professionnelles
Bachelor / Master
Tous les niveaux
Niryo Success pour l’éducation
Support gratuit pour faire de votre projet un succès
Niryo Expert+ pour l’éducation
Accompagnement d’expert pour maximiser vos performances
NiryoAcademy
Des ressources adaptées à vos objectifs
CAS D’USAGE
Découvrez l’éducation en action
Des applications pratiques qui relient la théorie à l’expérience en robotique industrielle
RESSOURCES UTILES
Centre de téléchargement
FAQ
Blog
Documentation
Ressources sur mesure, adaptées à vos objectifs d’apprentissage
Logiciel pour concevoir et déployer des applications robotiques
Programmation simplifiée avec Blockly et Python
DÉCOUVREZ NIRYO
À propos de Niryo
Tout ce que vous devez savoir sur Niryo
Carrière
Rejoignez l’équipe Niryo
Devenez distributeur
Rejoignez les distributeurs qui nous font confiance.
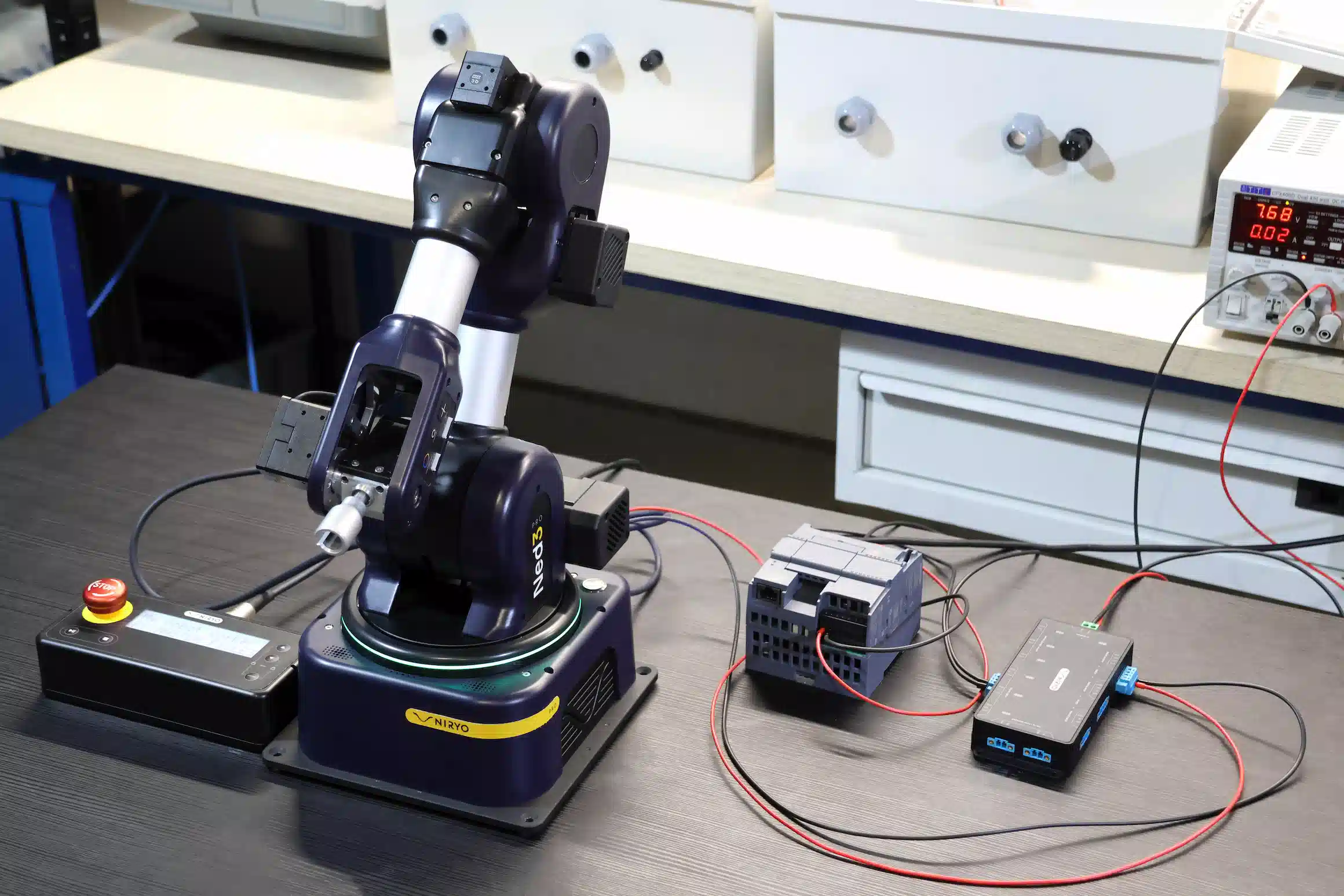
Apprendre l’automatisme industriel via le contrôle par automate programmable avec le robot Ned2
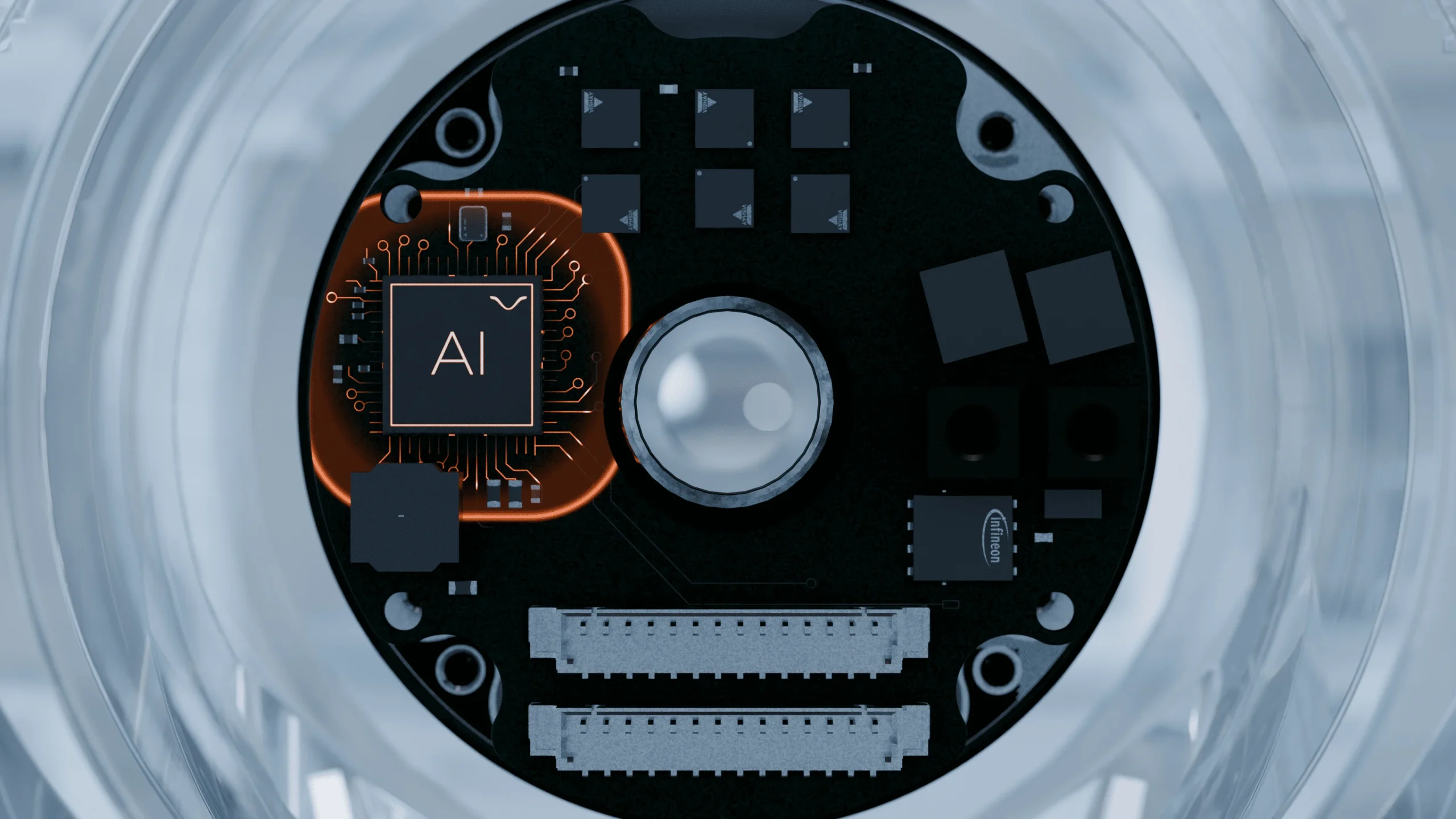
Physical AI : comment passer du laboratoire à la réalité industrielle ?
Nate dévoilée à Global Industrie : une nouvelle génération de robotique industrielle modulaire
Robotisez votre ligne pédagogique dans des conditions proches du réel avec notre Pack Intégration
Pourquoi enseigner la cybersécurité à l’aide de systèmes physiques tels que des robots collaboratifs ?
Sourcing Made in France : relocaliser sans perdre en compétitivité
Former les futurs ingénieurs à la cybersécurité, avec des robots conçus pour l’enseignement : quand la théorie rencontre le réel
Robotique souveraine : un levier stratégique pour l’industrie française de la Défense
Physical AI : comment l’intelligence artificielle transforme la robotique industrielle
Souveraineté robotique : pourquoi la modularité est clé pour l’indépendance technologique européenne
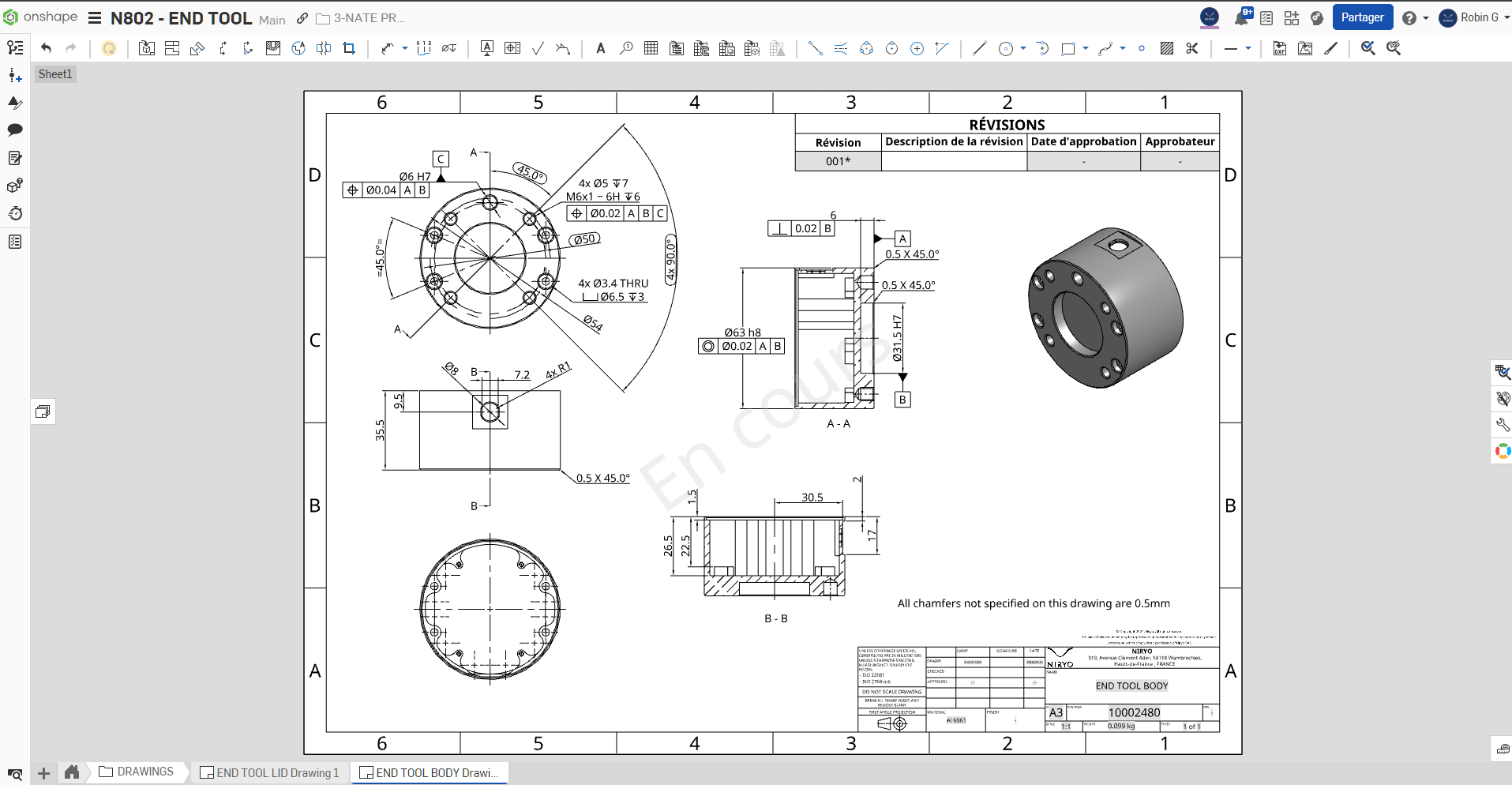
Comment améliorer la conception mécanique avec des outils collaboratifs ? Le choix de Onshape
Niryo dévoile Nate, la plateforme robotique qui démocratise l’automatisation industrielle
Comment allier l’intelligence Artificielle (IA) et la robotique dans vos enseignements, du secondaire au supérieur ?
Pourquoi privilégier un robot collaboratif, à un robot industriel, pour l’enseignement ?
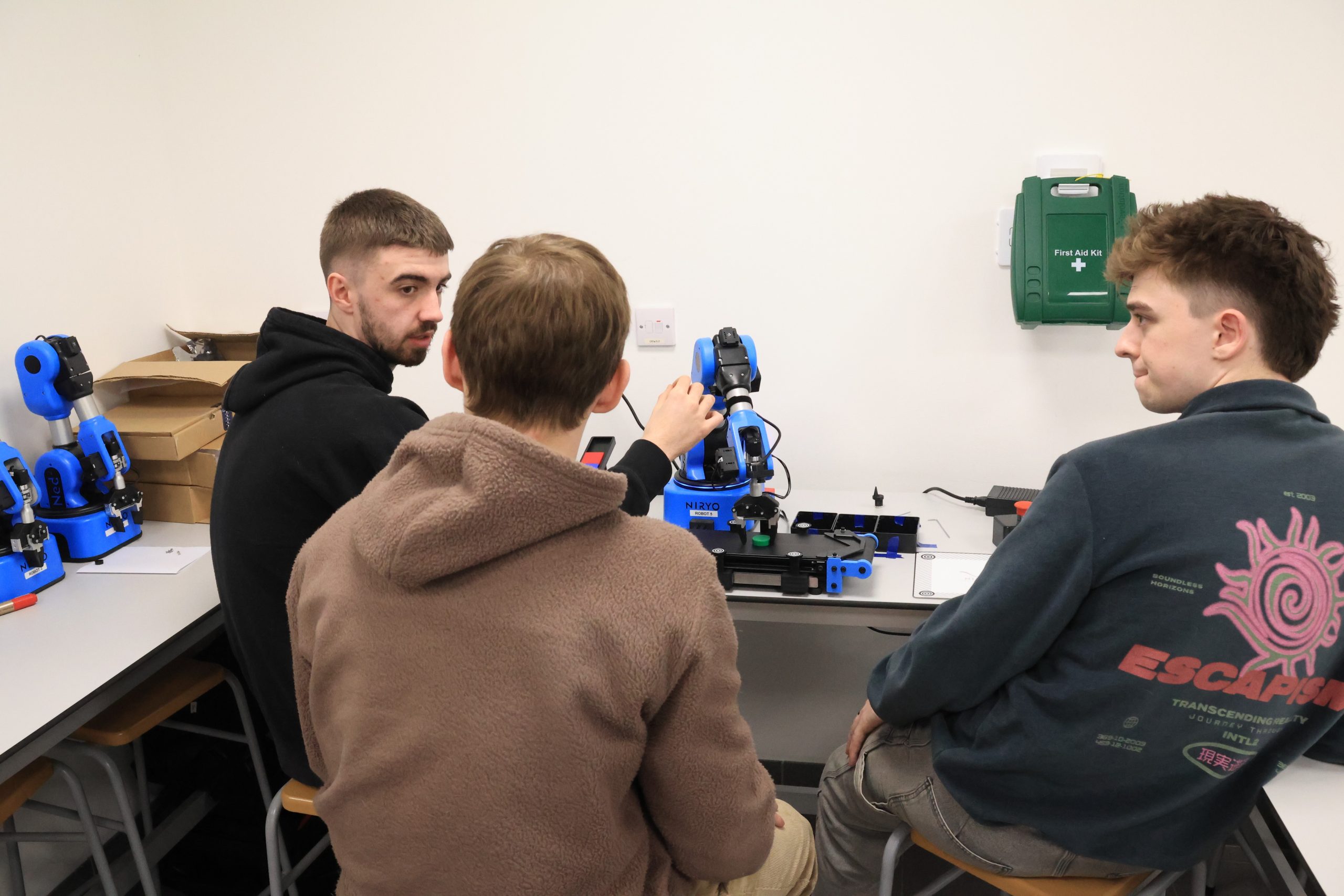
L’impact de la robotique sur l’engagement des élèves
De l’enseignement à l’entreprise : comment créer un pont concret grâce à la robotique
Robotique et interdisciplinarité : maths, physique et informatique en action
Les capteurs dans la robotique : rôle et types les plus utilisés
Accessories
ALL PRODUCTS
Automatisation sur-mesure de vos processus.
Du défi au déploiement : découvrez comment nos clients créent de la valeur avec Niryo.
NIRYO POUR L’INDUSTRIE
Accompagnement gratuit pour réussir votre projet.
Accompagnement d’expert pour maximiser vos performances.
Des ressources adaptées à vos objectifs.
Des applications pratiques qui relient la théorie à l’expérience en robotique industrielle.
NIRYO POUR L’ÉDUCATION
IA
FAQs
Ressources sur mesure, adaptées à vos objectifs d’apprentissage.
Logiciel pour concevoir et déployer des applications robotiques.
Programmation simplifiée avec Blockly et Python.
 Contact
Contact 





 Se connecter
Se connecter