The collaborative robot for accessible and flexible automation
The most advanced robot for education
Available for all use cases
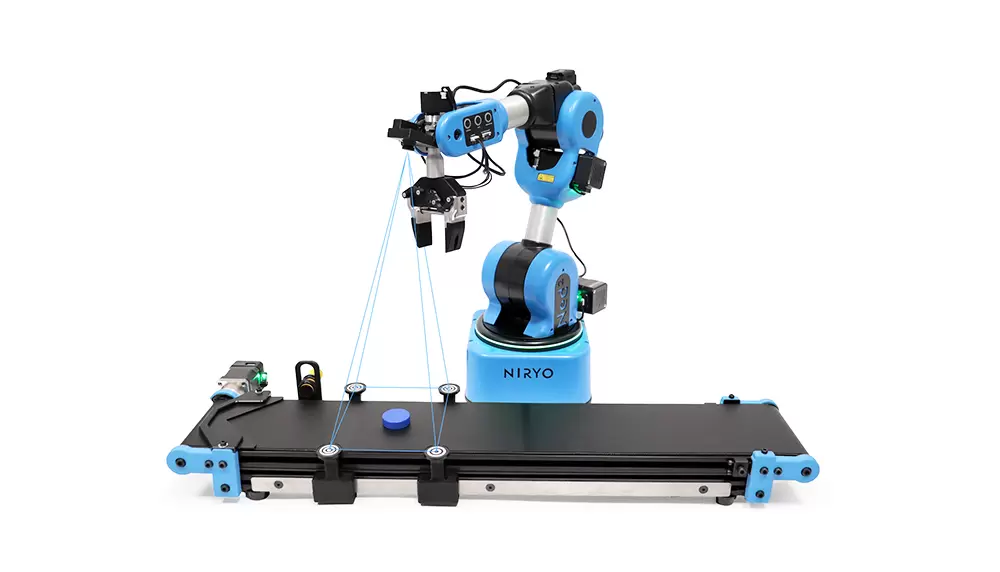
All-in-one pack to get started in robotics
Complete robotics pack for all levels
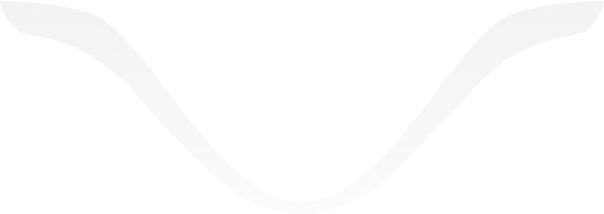
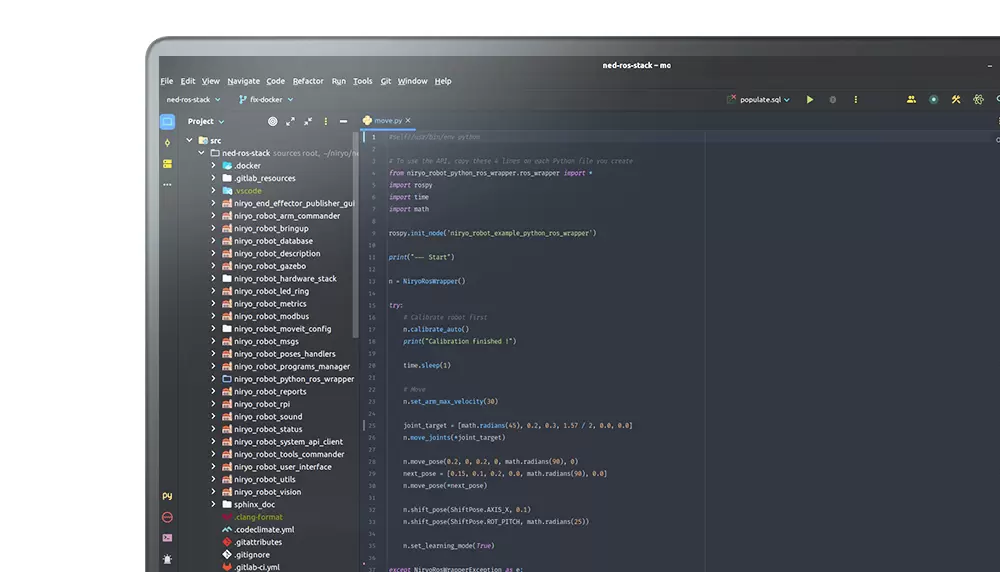
Simplified programming with Blockly and Python.
Tailor-made resources, adapted to your learning objectives.
Tailor-made automation of your processes.
Free support to make your project a success.
Expert support to maximize your performance.
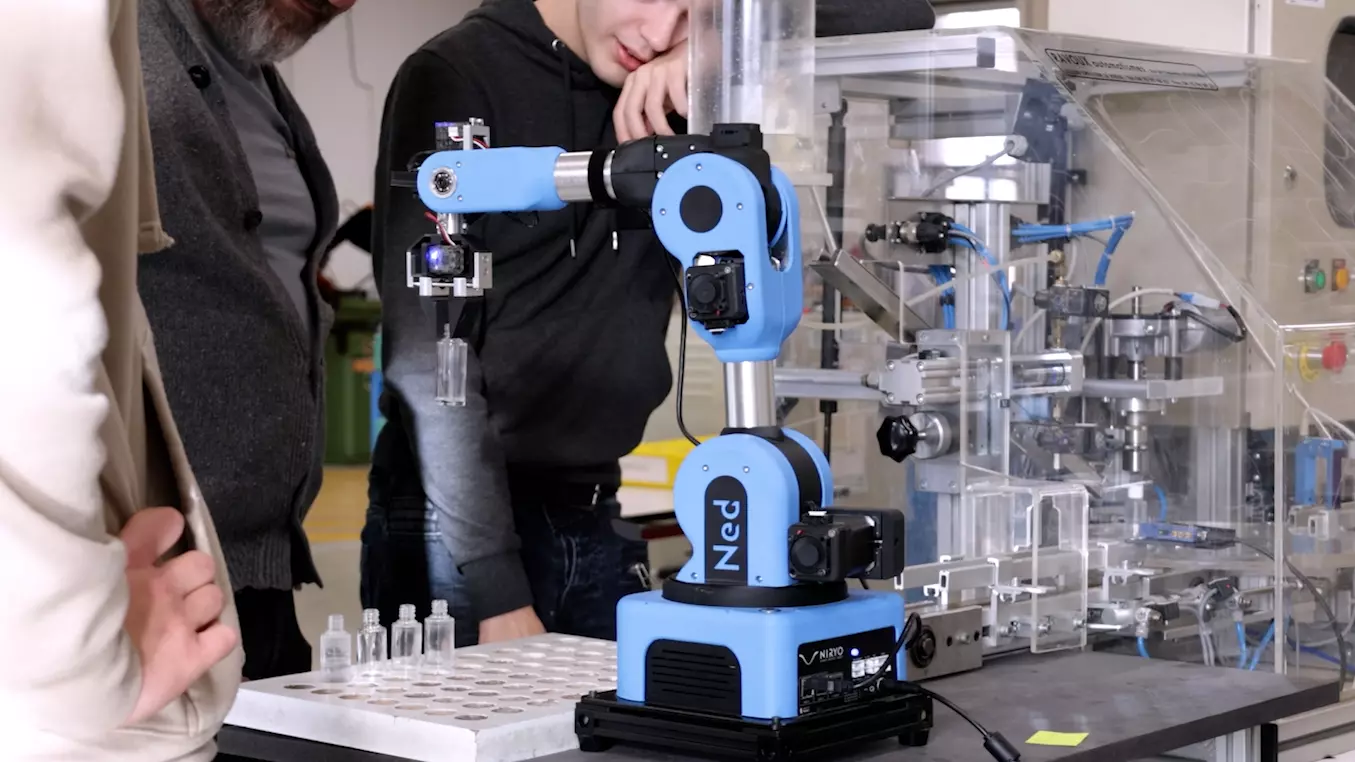
How a food sauce manufacturer industrialized and automated the quality control of its bottles.
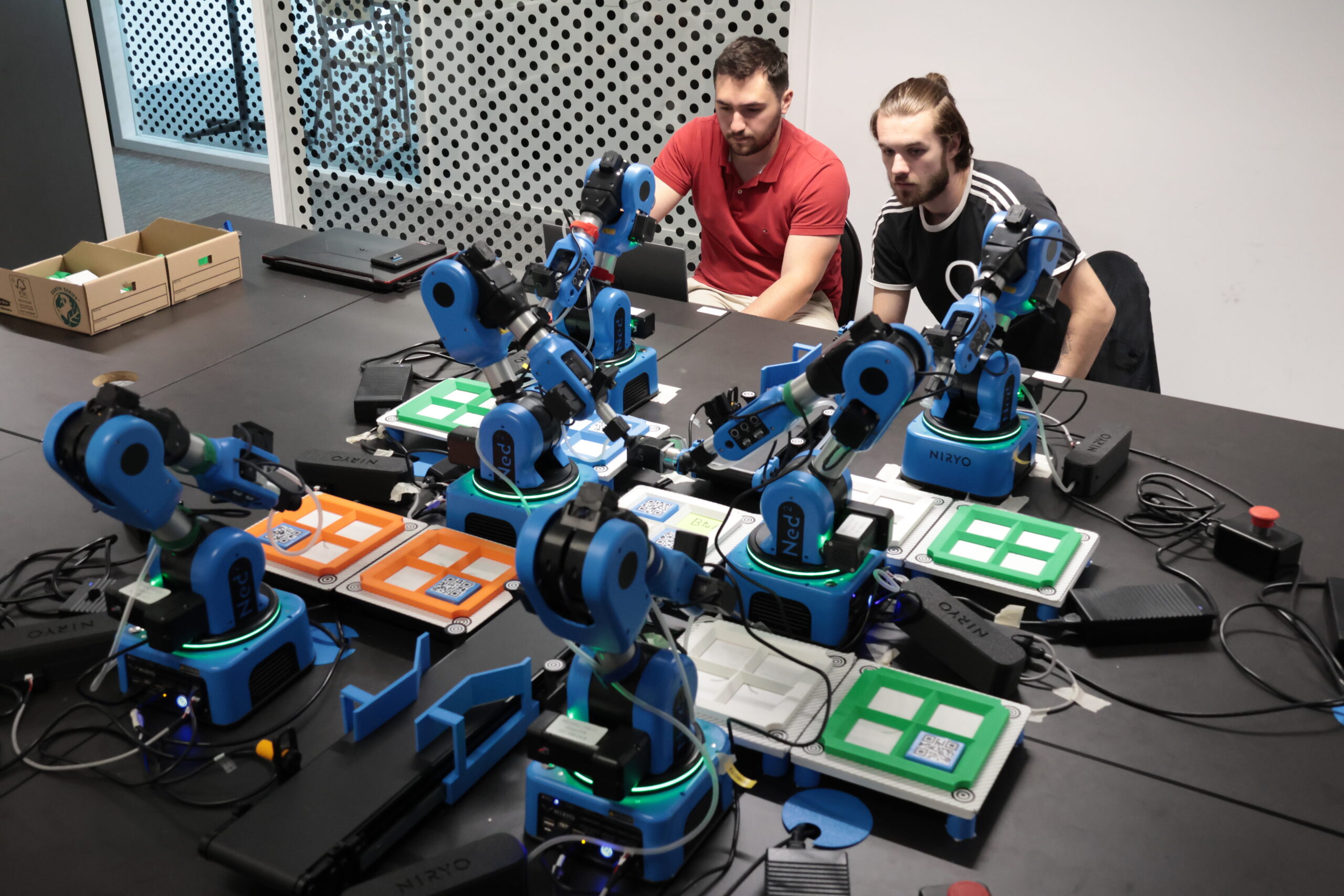
The potential of robotics in the classroom.
Skills development with Niryo
Latest application updates
Answers to your questions
Detailed specifications and features
3D Accessories Models
Everything you need to know about Niryo
Join the distributors who trust us.
Join the Niryo team
Detect, identify, and sort packages based on their color with Ned2
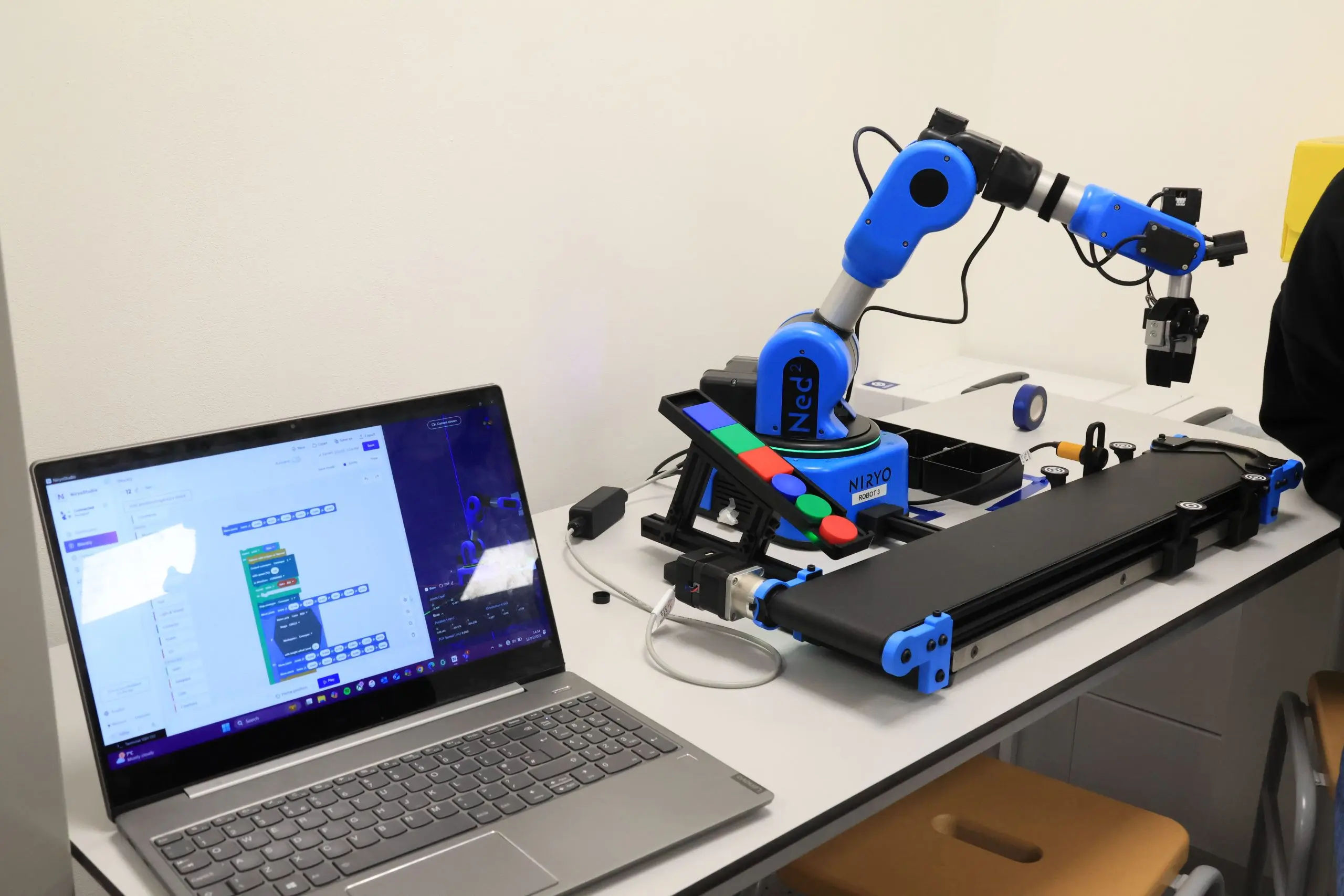
Collaborating with CESI Lyon to Bring Robotics to Life: The Micro Learning Factory
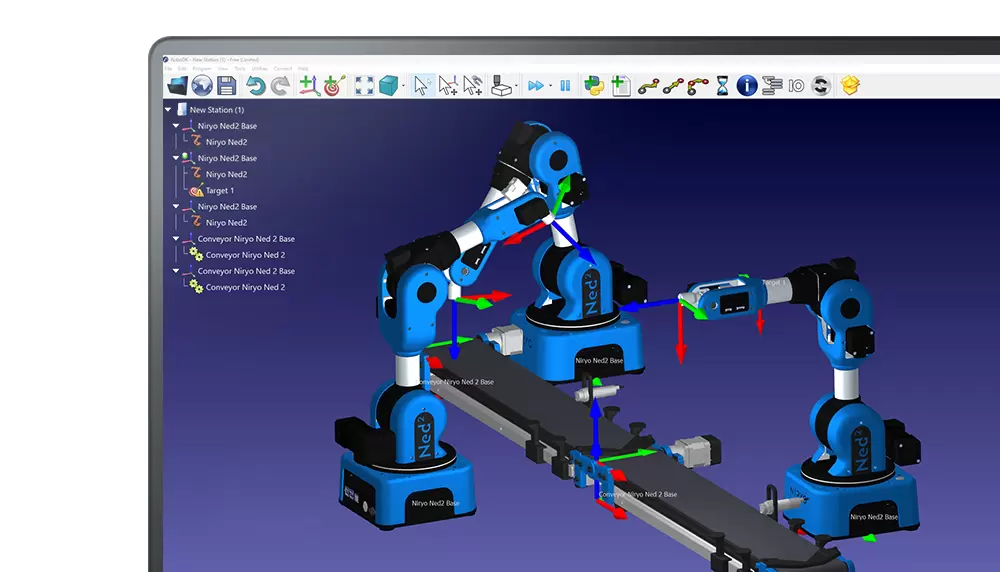
Simulating the Assembly of a Mini Ford T with a robot arm
Enhancing Robotics Skills: Hands-On Training for students
Learn Programming
Explore Robotics.
IA Vision Training
Discover Industry 4.0
Using AI to reproduce sign language with a robotic arm
Reproduction of robot movements by AI
Give the robot instructions and link it with AI algorithms
Develop your students’ creativity in a fun way with Ned2
Introduction to a production line
Simulate a robotic palletizing
Introduction to robotics






 Sign in
Sign in