




Lorsqu’il s’agit de former la prochaine génération d’ingénieurs et de scientifiques, les robots jouent un rôle essentiel en initiant les étudiants à l’automatisation et à la fabrication avancée.
Cependant, le défi consiste à choisir le bon type de robot pour les salles de classe, qu'il s'agisse de lycées techniques or Enseignement supérieur tel que écoles d'ingénieurs et universités. Trois types de robots particulièrement adaptés à des fins éducatives sont les robots SCARA, Delta et 6 axes.
Dans cet article, nous comparerons et opposerons ces trois types de robots à usage éducatif afin que nous puissions vous aider à choisir le meilleur en fonction de vos besoins.
Avant de commencer, définissons les trois types de robots susmentionnés :
Robots Delta
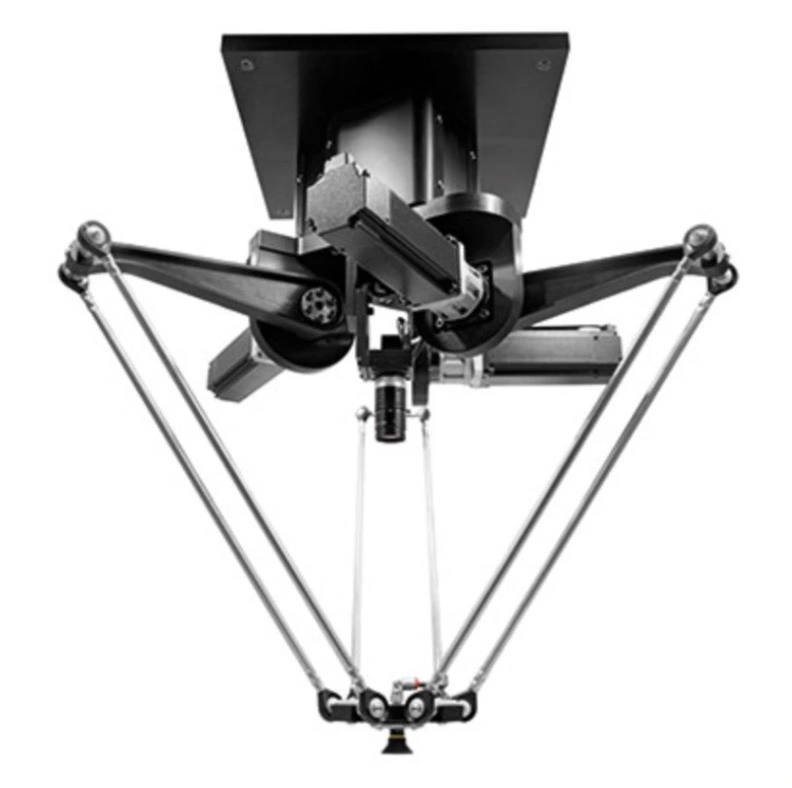
Robots Delta sont des robots parallèles constitués de trois bras reliés à des joints universels à la base supérieure. La principale caractéristique de conception est l'utilisation de parallélogrammes dans les bras, qui maintiennent l'orientation de l'effecteur final.
Robots SCARA

La SCARE est un type de robot industriel qui représente «Bras de robot d'assemblage de conformité sélective» or «Bras de robot articulé à conformité sélective». Les deux peuvent être trouvés.
Il est communément connu pour sa vitesse et sa précision élevées.
Robots collaboratifs 6 axes

Cobots 6 axes comme Ned2 sont une forme de robots articulés connus pour leur capacité à réaliser une large gamme d’applications, grâce à leur flexibilité, leur portée et leur résistance.
Comparons maintenant les trois en termes de prix, d'axe, de vitesse, de diversité d'applications et d'open source.
Prix: les robots ne naissent pas et n'ont pas le même prix
Le coût des cobots peut varier en fonction de divers facteurs tels que taille, fonctionnalités et complexité.
Robots Delta tend à être le plus cher des trois types. Les petits cobots Delta adaptés à des fins éducatives coûtent généralement entre 10,000 50,000 et XNUMX XNUMX dollars en fonction de leurs caractéristiques et capacités spécifiques.
Robots Scara sont généralement moins chers que les cobots Delta, avec des prix allant de 5,000 25,000 $ à XNUMX XNUMX $ pour les petits robots conçus à des fins éducatives.
Cobots 6 axes sont souvent le plus abordable des trois types, avec petits cobots à des fins éducatives allant de 3,000 $ à 20,000 $.
Il convient de noter que ces fourchettes de prix sont approximatives et le coût réel de chaque cobot peut varier en fonction du fabricant, du fournisseur et d'autres facteurs tels que les options de personnalisation et les modules complémentaires. En général, les cobots à 6 axes ont tendance à être les plus abordables, tandis que les cobots Delta sont généralement les plus chers. Les robots Scara se situent quelque part entre les deux.
En fin de compte, le coût du cobot dépendra des besoins spécifiques et du budget du programme éducatif.
Axe et flexibilité
Le nombre d’axes d’un robot affecte son amplitude de mouvement et sa précision. Les robots Scara ont généralement trois ou quatre axes, ce qui signifie qu'ils peuvent se déplacer dans trois dimensions, mais ne peut pas tourner comme un poignet humain.
Les robots Delta ont trois axes et peuvent se déplacer dans les trois dimensions, mais ont rotation limitée. Les cobots à 6 axes ont des axes qui peuvent se déplacer dans les six degrés de liberté, permettant une plus grande précision et flexibilité.
Vitesse
La vitesse est un facteur important à prendre en compte lors du choix d’un robot. Cela affecte les performances du robot dans différentes applications et peut également affecter le temps nécessaire à la programmation du robot pour une tâche spécifique. À moins que le robot ne soit utilisé à des fins éducatives, la vitesse ne sera pas un facteur crucial. Des moteurs adéquats jouent ici aussi un rôle essentiel.
La vitesse de chaque type de robot est mesuré par son temps de cycle (le temps écoulé entre deux mouvements consécutifs) et le taux d'accélération/décélération (la vitesse ou la lenteur avec laquelle il se déplace).
La vitesse d’un robot est un facteur important dans ses performances. Les robots Scara sont les plus rapides des trois. La vitesse plus élevée des robots Scara les rend idéaux pour les tâches nécessitant des mouvements rapides, telles que les opérations de prélèvement et de placement.
La précision de Les cobots à 6 axes les rendent également adaptés aux tâches qui nécessitent de la précision, comme le soudage ou l'assemblage, et c'est ce qui les rend également adaptés à la recherche et à l'apprentissage.
Diversité des applications
Chaque type de robot possède une gamme d’applications pour lesquelles il est le mieux adapté.
Les robots Scara sont idéaux pour les opérations de prélèvement et de placement, l'assemblage et l'emballage rapides, tandis que Les robots Delta sont bien adaptés aux tâches qui nécessitent une grande enveloppe de travail, comme le tri et l'inspection.
Les cobots 6 axes sont très polyvalents et peut être utilisé dans une large gamme d'applications, notamment le soudage, le placement et l'assemblage.
Taille et praticité
La taille d’un robot est importante car elle affecte sa polyvalence et sa compatibilité avec différents espaces de travail.
Les robots Delta sont généralement les plus grands des trois et nécessitent un espace de travail relativement grand. Cependant, il existe également des versions plus petites des cobots Delta. Cependant, son architecture avec la base fixée au plafond rend difficile le test d'applications et de projets variés.
Autrementles robots cara sont généralement plus petits que les robots Delta et ont une conception plus compacte.
Cobots 6 axes sont disponibles dans une variété de tailles, mais il existe également de petites options adaptées à des fins éducatives. Un exemple de petit cobot à 6 axes est Ned2, Il a un encombrement de 320 mm x 220 mm et une hauteur de 500 mm, ce qui en fait une bonne option pour les petites salles de classe ou les laboratoires avec un espace limité.
Ned2 est conçu pour être abordable et facile à utiliser, ce qui en fait un excellent choix pour les enseignants qui souhaitent présenter la robotique à leurs élèves.
Qu'en est-il de l'open source?
La compatibilité open source est une considération importante pour les enseignants qui souhaitent personnaliser leurs robots ou les intégrer à d'autres technologies. Les robots Scara sont les moins compatibles avec les logiciels open source, tandis que les robots Delta offrent un certain degré de compatibilité open source. Les cobots à 6 axes sont généralement les plus compatibles open source, avec une gamme de logiciels et d'options de programmation disponibles.
Par exemple, Ned2 emploie Raspberry Pi comme matériel et utilise Python et C++ comme langages de programmation, en plus de ROS comme son logiciel. De plus, notre Studio Niryo l'application offre aux étudiants la possibilité de programmer le robot via Blockly, un langage de programmation visuel qui peut les aider à explorer divers aspects de la robotique.
De conclure…
Chaque type de robot présente des avantages et des inconvénients uniques, ce qui les rend adaptés à différentes applications. Les robots Scara sont les plus abordables et les plus rapides, ce qui les rend idéaux pour les opérations de prélèvement et de placement et l'emballage. Les robots Delta ont une large enveloppe de travail et sont bien adaptés aux tâches qui nécessitent un haut niveau de précision. Les robots 6 axes sont très polyvalents et peuvent être utilisés dans une large gamme d'applications.
Pour les enseignants, le meilleur choix dépendra des besoins spécifiques de leur programme, mais les robots 6 axes sont probablement l'option la plus polyvalente et adaptable en raison de leur compatibilité open source et de leur flexibilité.