



Il y a 3 ceintures à l'intérieur de Niryo One (axes 1, 2 et 3).
Une ceinture détendue peut être la cause d’un échec d’étalonnage ou d’une commande de mouvement.
Pour chaque courroie, nous vous montrerons comment détecter si la courroie n'est pas suffisamment tendue, et comment la tendre davantage.
Pour tendre une courroie, vous aurez besoin d'un tournevis ou d'une clé allen.

Ceinture axe 1
Vous pouvez vérifier la tension de la courroie lors de l'exécution d'un calibrage automatique. Si la courroie n'est pas suffisamment tendue, le moteur 1 ne s'arrêtera pas lorsqu'il aura atteint la position maximale de l'axe. Vous pouvez entendre un son comme « tac tac tac ». L'étalonnage échouera car il y a un délai d'attente de 30 secondes.
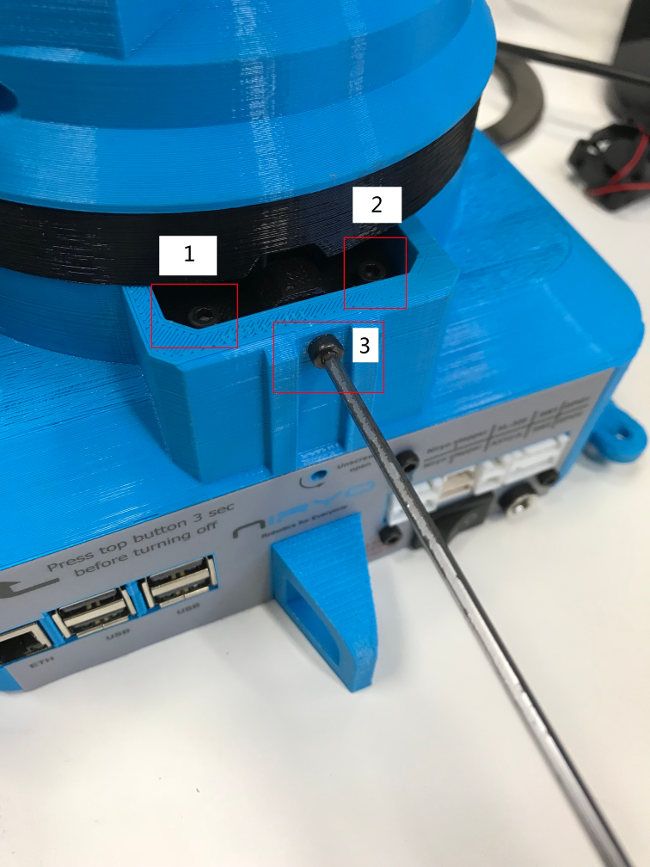
Desserrez un peu les vis 1 et 2 pour que la partie courroie de tension puisse bouger. Ensuite, serrez la vis 3 pour tendre davantage la courroie. Enfin, serrez les vis 1 et 2.
Vous pouvez répéter cette opération jusqu'à obtenir un calibrage normal. Notez qu’il ne faut pas non plus trop tendre la ceinture, cela pourrait également empêcher le robot de bouger normalement.
Ceinture axe 2
Si la ceinture de l'axe 2 n'est pas suffisamment tendue, vous aurez surtout des problèmes lors de l'exécution des commandes de déplacement. Le bras et l'avant-bras du robot peuvent parfois tomber à cause du glissement de la ceinture.
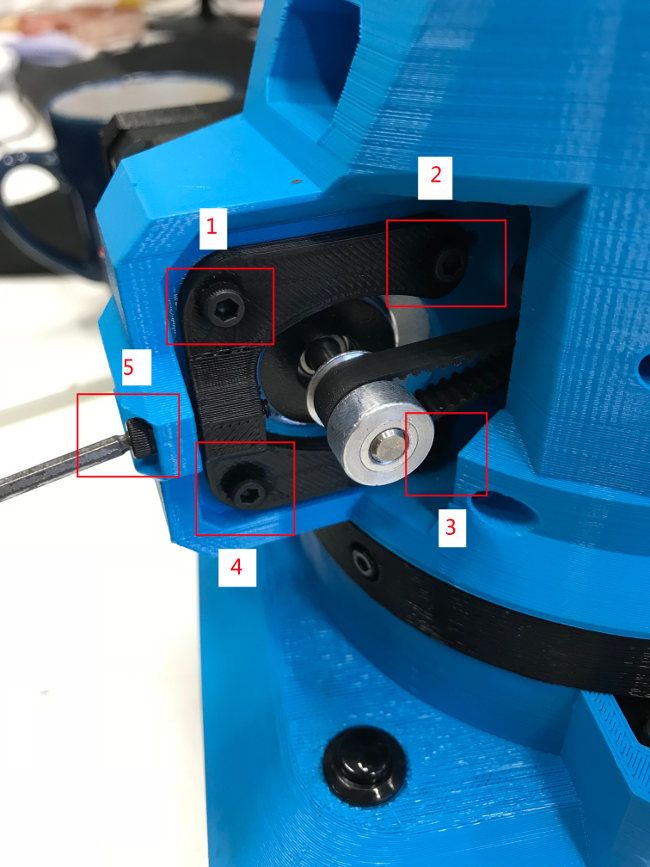
Desserrez un peu les vis 1, 2, 3 et 4. Ensuite, serrez la vis 5 pour tendre davantage la courroie. Ne tendez pas trop la courroie, sinon le moteur ne pourra pas déplacer l'axe. Vous pouvez ensuite resserrer les vis 1, 2, 3 et 4.
Ceinture axe 3
Vous pouvez vérifier la tension de la courroie lors de l'exécution d'un calibrage automatique. Comme pour l'axe 1, si la courroie n'est pas suffisamment tendue, le moteur 3 ne s'arrêtera pas en atteignant la position maximale de l'axe, et vous entendrez un son « tac tac tac ».
Notez que pour le moteur 3, entendre 3-4 « tac » est acceptable. Si vous entendez bien plus de 3-4 « tac », ou si le calibrage ne réussit tout simplement pas, c'est que la courroie n'est pas suffisamment tendue.
Aussi, lors de l'exécution d'une commande de déplacement utilisant principalement l'axe 3, par exemple pour soulever un objet, si la courroie semble déraper, il faudra la tendre davantage.

Desserrez un peu les vis 1, 2, 3 et 4. Ensuite, serrez la vis 5 pour tendre davantage la courroie. Ne tendez pas trop la courroie, sinon le moteur ne pourra pas déplacer l'axe. Vous pouvez ensuite resserrer les vis 1, 2, 3 et 4.
Si vous rencontrez toujours un problème de calibrage ou de commande de déplacement
Si toutes les courroies sont suffisamment tendues, mais qu'un axe ne parvient toujours pas à se calibrer automatiquement ou à exécuter une commande de déplacement, cela peut être :