



Si vous avez reçu un message d'avertissement sur Niryo One Studio indiquant que vos Niryo Steppers ne sont pas à jour, ou si vous souhaitez utiliser Niryo Steppers dans un but différent, alors ce tutoriel est ce que vous recherchez.
Vous pouvez vérifier votre version actuelle dans la partie « Paramètres » de Niryo One Studio. Le numéro de la dernière version peut être trouvé sur le page de téléchargement.
Étape 1 : Préparez votre IDE Arduino
Si vous n'avez pas installé l'IDE Arduino, téléchargez-le et installez-le depuis ici.
Le microcontrôleur (type SAMD) utilisé dans Niryo Stepper n'est pas déjà inclus dans les cartes supportées, vous devrez donc ajouter l'extension.
Ouvrez le gestionnaire de tableaux.
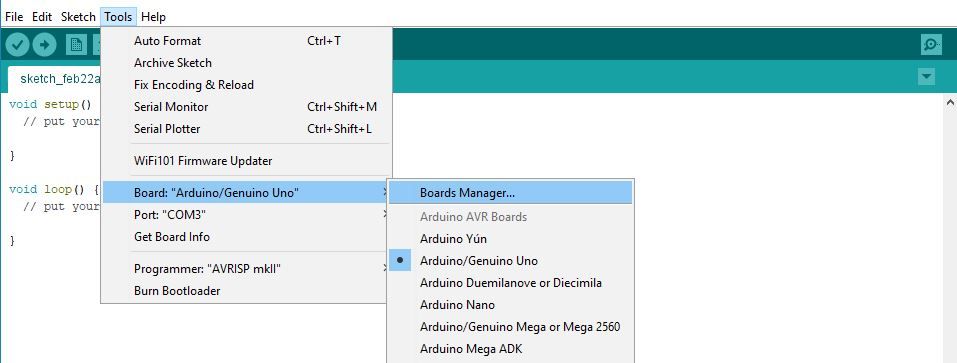
Recherchez « zéro ».
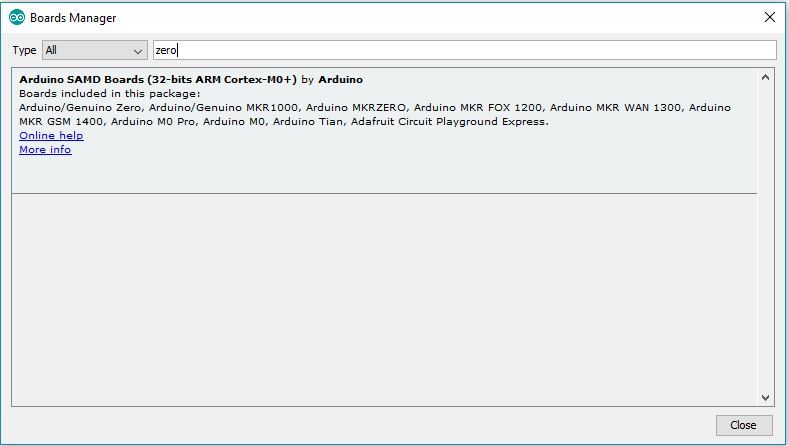
Cliquez sur le package et installez-le. Cela peut prendre quelques minutes.
Une fois terminé, redémarrez votre IDE Arduino.
Étape 2 : Obtenez le firmware Niryo Stepper
Téléchargez le firmware depuis notre page de téléchargement ou directement auprès de notre référentiel github (prenez la dernière version).
Extrayez l'archive. Si le nom du dossier n'est pas « NiryoStepper », alors renommez-le et donnez-lui ce nom.
Ouvrez le dossier et double-cliquez sur NiryoStepper.ino. Le programme s'ouvrira dans votre IDE Arduino.
Étape 3 : Téléchargez le code pour chaque moteur
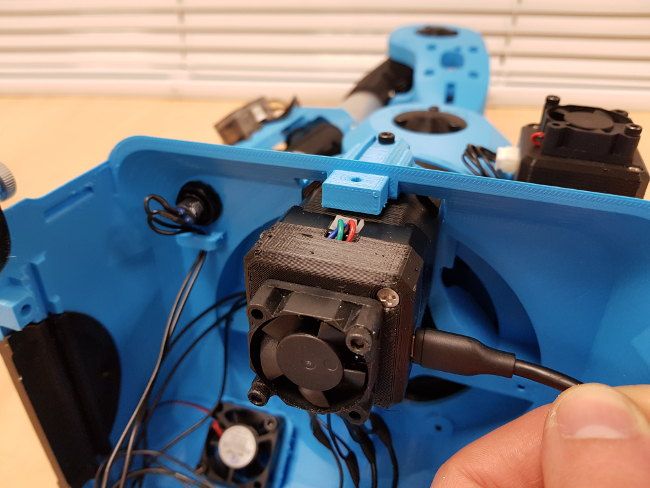
Vous devez maintenant utiliser un câble microUSB vers USB pour connecter un Niryo Stepper à votre ordinateur.
Note importante: : si l'IDE Arduino ne parvient pas à télécharger le programme lorsqu'il est connecté à un port USB 3.0, essayez d'utiliser un USB 2.0 port à la place.
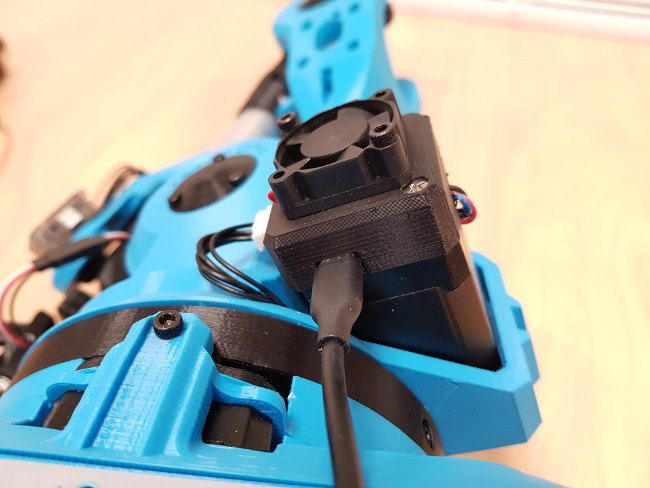
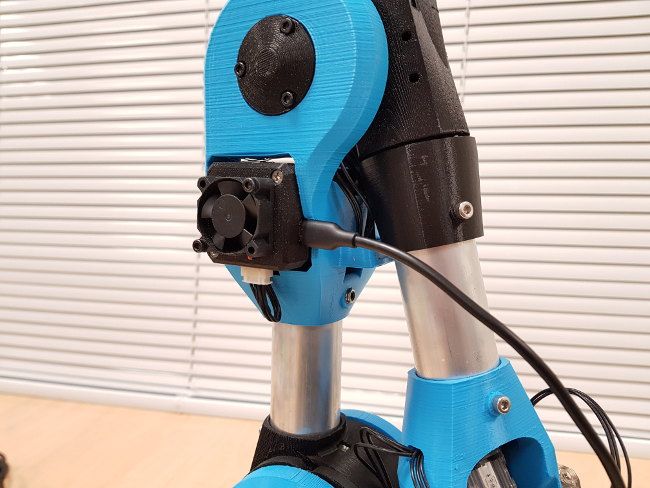
Voici comment connecter le câble microUSB à chaque moteur :
Niryo Stepper1 :
Niryo Stepper2 :
Niryo Stepper3 :
Niryo Stepper 4 (uniquement pour le matériel V1, commandes avant septembre 2018) :

Avant de télécharger un code, assurez-vous de suivre ces instructions :
- Recherchez la ligne commençant par #define MOTOR_ID
- !!! Pour chaque moteur, vous devez mettre le bon identifiant avant de télécharger le code. !!! (Les ID sont 1 pour le moteur 1, 2 pour le moteur 2, etc.)
- Si vous entrez ici un mauvais identifiant, le robot ne fonctionnera pas correctement.
- Ex : les moteurs 1 et 2 ont le même ID, donc le robot ne trouve pas le moteur 1.
- Ex 2 : le moteur 1 a l'ID 2 et le moteur 2 a l'ID 1 –> cela entraînera des mouvements étranges de la part du robot.
Commençons par Niryo Stepper 1 :
Changez l'ID du moteur en 1 : #define MOTOR_ID 1
Connectez le câble à votre ordinateur et :
- Sélectionnez Arduino/Genuino Zero (port USB natif) dans Outils/cartes
- Sélectionnez votre carte connectée à votre ordinateur dans Outils/port

Cliquez maintenant sur Télécharger (bouton du haut avec une flèche). Attendez quelques secondes. Vous devriez voir un message comme celui-ci au bas de l'EDI :
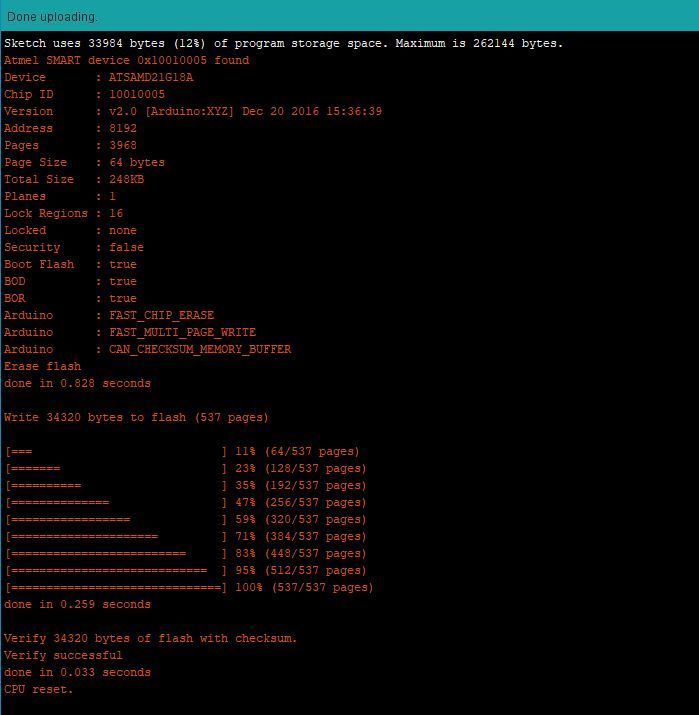
Une fois terminé, répétez cette étape pour chaque moteur. (n'oubliez pas de changer l'ID dans le code avant votre téléchargement)
C'est tout !
Notes:
- Si on vous a demandé de mettre à jour vos Niryo Steppers (depuis Niryo One Studio), il est possible que vous deviez également mettez à jour votre image Raspberry Pi.