




PyNiryo est un package Python permettant d'envoyer Ned commandes depuis n'importe quel système, via un API TCP/IP. Il s'agit de la continuité de l'API TCP/IP de Niryo One, avec une installation simplifiée et une palette de fonctions plus large.
Qu'est-ce qu'une API?
Une API, pour Interface de Programmation d'Application, est un ensemble de fonctions/définitions facilitant l'intégration d'un logiciel au sein d'un programme.
Qu'est-ce que le protocole TCP ?
TCP, pour Transmission Control Protocol, est le protocole de communication réseau qui permet l'envoi de messages entre votre ordinateur et votre robot.
Que permet PyNiryo ?
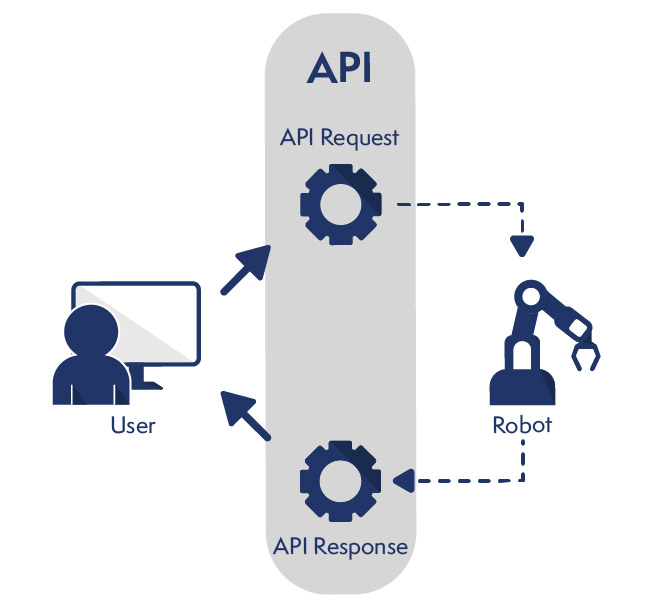
PyNiryo permet un contrôle facile et complet d'un ou plusieurs robots connectés au même réseau que votre ordinateur, via des commandes de haut niveau. Ces commandes sont envoyées via un Script Python De votre ordinateur. Les commandes sont récupérées et interprété par le serveur TCP du robot. Les commandes sont ensuite exécutées et les résultats sont envoyés à votre ordinateur par le serveur TCP.
Quels sont les avantages de PyNiryo ?
PyNiryo permet la contrôle d'un ou plusieurs robots à partir d'un programme Python qui s'exécute sur votre ordinateur. Par conséquent, le code est plus facile à développer et à déboguer comme vous pouvez simplement modifiez votre code dans votre interface de développement préférée et relance-le sans avoir à utiliser SSH.
De plus, vous pouvez lancer le programme du robot directement depuis votre ordinateur, qui permet de bénéficier, selon la configuration de votre ordinateur, de ressources supérieures à celles du Raspberry Pi. Vous pouvez alors inclure des fonctions demandant plus de ressources tel que traitement d'image ou encore machine learning qui vous permet d'aborder l'utilisation de Vision dans le domaine de l' Industrie 4.0.
Les fonctionnalités de PyNiryo
PyNiryo contient plus de quarante fonctions qui vous permettent de contrôler le robot et son écosystème (déplacements, utilisation des outils, Tapis roulant, Vision Set…), vous permettant de des usages industriels prototypes orientés vers industrie 4.0.
PyNiryo peut être utilisé pour récupérer des informations sur la position et l'état actuel du robot ainsi que les valeurs du GPIO, la vision de la caméra et encore plus de fonctions.
La communication avec le robot via TCP/IP permet également de contrôler plusieurs robots à partir du même programme. Ainsi, il est également possible de combiner PyNiryo et Bibliothèque de threads Python pour activer le contrôle de plusieurs Ned simultanément de nombreux clients simuler, par exemple, une ligne de fabrication utiliser la robotique collaborative.
Vous pouvez trouver plus d'informations à ce sujet en vous référant à notre tutoriel sur le multithreading.
PyNiryo
API PyNiryo reprend les fonctionnalités du robot disponibles via ROS. Voici une liste non exhaustive de ces fonctionnalités :
- Déplacez le robot
- Utiliser la vision
- Bandes transporteuses de contrôle
- Récupérer les informations des broches GPIO
Fonctions visuelles ont également été ajoutés à PyNiryo pour permettre à l'utilisateur de découvrir comment créer son propre pipeline de traitement d'image à aller encore plus loin dans la découverte et l'apprentissage de la robotique collaborative dans l' industrie 4.0.
Ces fonctions sont basé sur OpenCV, une bibliothèque Open Source pour la vision par ordinateur. Cela permet également d'utiliser ces images avec Cadres d'apprentissage en profondeur comme Tensorflow et PyTorch.
L'installation de PyNiryo est également simplifiée. En effet, il est disponible sur l'installation du package Python PyPi. Pour l'installer, exécutez la commande « pip install pyniryo ».
Pour plus d'informations sur l'installation de PyNiryo, cliquez sur ici.
Conclusion
Pour conclure, notre Paquet Python PyNiryo est une interface ingénieuse vous permettant de mettre plusieurs projets orientés vers industrie 4.0 en action, dans un Easy, rapide et façon efficace.