



Certains des problèmes que vous pouvez rencontrer lors de l'utilisation de Niryo One sont dus à une erreur lors de la phase d'assemblage. De plus, si vous assemblez le robot vous-même, vous devrez faire attention à certains points.
Vous trouverez ci-dessous une liste de problèmes possibles pouvant survenir en raison d'une erreur de montage.
!!! Avant de modifier quoi que ce soit sur le robot, assurez-vous de l'éteindre et de débrancher l'adaptateur secteur !!!
Tout d'abord, assurez-vous que vous avez correctement branché l'adaptateur secteur et allumé le bouton d'alimentation.
Tous les PCB ont été testés avant expédition. Tout problème concernant la LED provient probablement d'une connexion défectueuse entre le Raspberry Pi et le Panel Connector.
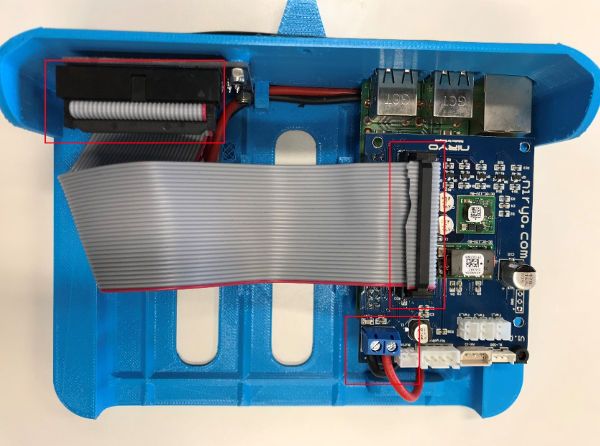
Assurez-vous que le Niryo Raspberry Pi Shield est correctement branché sur le Raspberry Pi 3, et que le JTAG-20 (19 câbles gris et 1 câble rouge) est correctement branché, comme indiqué ci-dessous :
Placez votre robot sur le côté et localisez le ventilateur à l'intérieur de la base.

Assurez-vous que le câble du ventilateur est correctement branché sur l'un des connecteurs du ventilateur du Niryo Raspberry Pi Shield.
Si le ventilateur est trop bruyant, c'est probablement parce qu'il n'est pas correctement monté, et a donc plus de vibrations. Assurez-vous que le ventilateur est réparé à 100 %.
Si vous ne parvenez pas à résoudre ce problème, il est possible que le ventilateur lui-même soit cassé. Essayez de remplacer le ventilateur par un neuf et testez à nouveau.
Il y a 2 possibilités ici.
1. Vérifiez que le connecteur 4 fils est correctement branché au moteur et que le câble 4 fils à proximité du moteur est suffisamment lâche pour que l'axe puisse bouger sans tirer sur le connecteur.
2. Lors du serrage des vis pour assembler les tubes en aluminium avec les pièces bleues imprimées en 3D, veillez à ne pas couper certains fils qui traversent les tubes.


Si besoin, vous pouvez utiliser un multimètre pour localiser les câbles cassés.
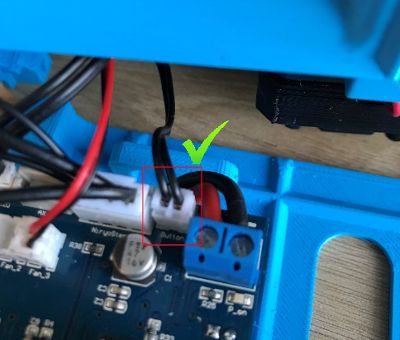
Vérifiez que le connecteur du bouton est correctement branché sur le Niryo Raspberry Pi Shield.
Vous ne devriez avoir aucun problème à ce sujet lors de l'assemblage du Niryo One car nous assemblons et testons nous-mêmes tous les Niryo Stepper.
Si vous démontez et remontez le Niryo Stepper par vous-même, veuillez prêter attention à ce qui suit.
Si vous choisissez une vis trop longue (23mm sur la photo) pour serrer le ventilateur à l'arrière du moteur pas à pas, la vis touchera une des capacités du PCB, qui sera détruite.

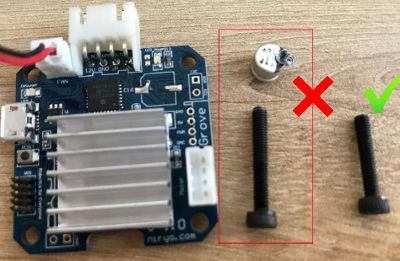
Assurez-vous d'utiliser une vis plus courte (19 mm maximum) afin qu'elle ne touche pas la capacité.
Si vous avez déjà détruit la capacité, retirez-la et remplacez-la par une nouvelle. Iciest la référence du composant.
Si vous démarrez un calibrage automatique et que le calibrage ne semble pas fonctionner, voici quelques guides pour déboguer et réparer votre robot (dans l'ordre) :