



Vous pouvez désormais commander Niryo One !
Concevoir un robot tel qu'un bras robotique à 6 axes est un vrai défi. Comme nous l'avons déjà expliqué dans un post précédent, un bras robotique est composé de trois grandes catégories : l'électronique, l'informatique et la mécanique. Aujourd'hui, nous aborderons la conception mécanique de Niryo One, notre premier produit, afin que vous puissiez découvrez les différents prototypes nous avons fait jusqu'à présent !
Plusieurs étapes sont nécessaires lors de la conception d’un produit mécanique.
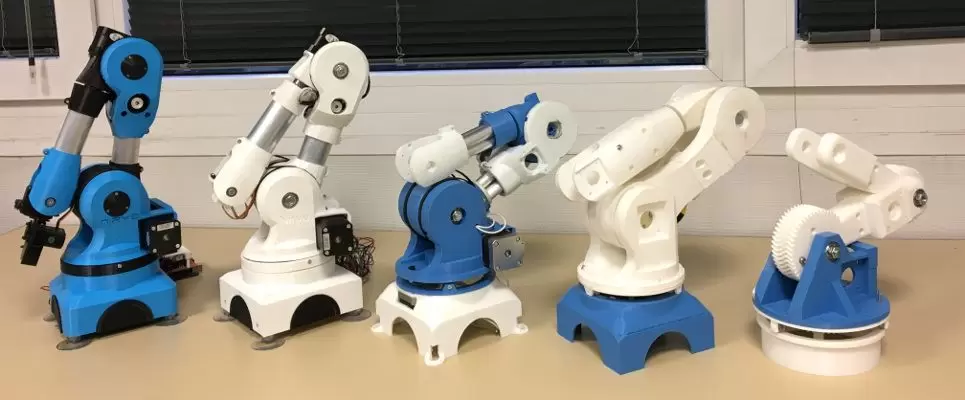
La première étape consistait à clarifier l'idée, et créer le robot à partir de zéro pour voir ce que nous avons pu faire (V1 et V1.2). Ensuite, nous avons testé différentes possibilités mécaniques (V2-4), jusqu'à ce que nous puissions dire que notre produit était cohérent et fonctionnel.
À partir de ce point, nous avons amélioré le précision et rigidité du robot. Cela nous a permis de passer tests d'intégration (V4.2). Le prototype V5 présente des améliorations en termes d'ergonomie et de conception et est le prototype sur lequel nous travaillons actuellement.
Nous effectuons la modélisation du robot sur un logiciel de CAO (Conception Assistée par Ordinateur) puis nous imprimons les pièces directement avec l'imprimante 3D. Cela nous fait gagner énormément de temps et nous permet de faire améliorations continues.
Prototype 1 a été conçu pour tester les principes fondamentaux de la robotique. Nous avons validé les mouvements de rotation selon 3 axes.

Prototype 1.2 reprend l'architecture mécanique précédente, mais le bras avant évolue avec un axe de rotation supplémentaire. Ce robot possède 4 degrés de liberté.
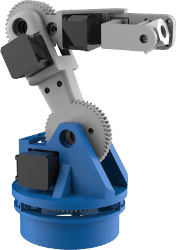
L'évolution de la prototype 2 est dans l'engrenage du bras principal, avec engrenage planétaire mise en œuvre. Cela centre le moteur sur son axe de rotation, et permet d'obtenir une réduction de 7:1 ainsi qu'un gain de robustesse.

Prototype 3 possède toujours le système d'engrenages planétaires, étendu aux rotations du bras, de l'avant-bras et du poignet.
Nos 4ème prototype est vraiment différent du prototype 3, en effet le système mécanique « engrenage planétaire » n'était pas assez fiable car imprimé en 3D. Ce prototype intègre des poulies et des courroies pour actionner les éléments en rotation. De plus, des tubes en aluminium allègent le bras, réduisent le temps d'impression du robot et améliorent sa rigidité.
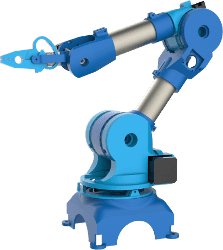
Prototype 4.2 est une continuation du précédent, avec une conception améliorée et une intégration de moteurs pas à pas pour chaque axe de rotation.
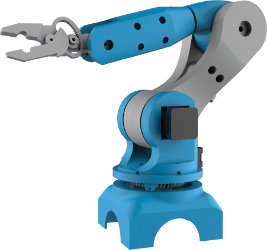
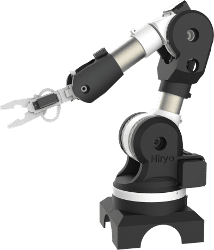
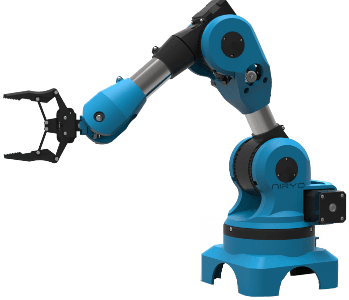
La dernière version au moment où nous parlons est prototype 5, qui est très proche de la version finale. Tous les 6 axes sont fonctionnels. Elle apporte une touche plus ergonomique et un design plus épuré que la version précédente.
Notre objectif est d'atteindre mécanique simplicité (ce qui n'est pas si simple !). Plus la mécanique est simple, plus fiable c'est. Utiliser l’impression 3D est formidable pour accélérer les processus de développement, même si nous devons parfois penser différemment afin de définir les formes plastiques les plus robustes.
Niryo One est maintenant disponible !